NTC - Nhiệt điện trở âm
Giới thiệu
- Thermistor là dạng điện trở nhiệt ngắn, có điện trở thay đổi theo nhiệt độ thay đổi.
- Thermistors là không tốn kém, gồ ghề, đáng tin cậy và đáp ứng một cách nhanh chóng. Bởi vì những phẩm chất này, thermistors được sử dụng cho các phép đo nhiệt độ thấp đơn giản, nhưng không phải cho nhiệt độ cao.
- Thermistors chủ yếu được sử dụng trong nhiệt kế kỹ thuật số và thiết bị gia dụng như tủ lạnh, lò nướng, và như vậy.
- Thermistors có sẵn trong các hình dạng khác nhau như que, đĩa, hạt, máy giặt, vv
- Thermistor khác với RTD. Trong Thermistor, vật liệu bán dẫn được sử dụng trong khi RTD có kim loại nguyên chất.
Ngoài ra, RTD là hữu ích cho phạm vi nhiệt độ lớn trong khi Thermistor hữu ích trên phạm vi nhiệt độ nhỏ thường -100 ° C đến 300 ° C.
Các loại Thermistor
1. PTC (hệ số nhiệt độ dương) Loại Thermistor
- Trong nhiệt độ tích cực nhiệt điện trở, điện trở của nhiệt điện trở tăng với nhiệt độ tăng.

PTC Thermistor kháng vs.Temperature
- PTC thermistor được chia thành hai nhóm dựa trên
1. vật liệu sử dụng
2. Cấu trúc và quy trình sản xuất của họ
- Trong nhóm đầu tiên, thermistor bao gồm silistors, sử dụng silic làm vật liệu bán dẫn. Chúng được sử dụng như cảm biến nhiệt độ PTC cho đặc tính tuyến tính của chúng.
- Nhóm thứ hai là loại điện trở nhiệt PTC chuyển đổi. Đây là loại thermistor PTC được sử dụng rộng rãi trong máy sưởi PTC, cảm biến, vv
- PTC thermistors chủ yếu được sử dụng như máy sưởi tự điều chỉnh, để bảo vệ quá dòng, vv
2. NTC (hệ số nhiệt độ âm) loại nhiệt điện trở:
- Trong hệ số nhiệt độ âm nhiệt điện trở, điện trở giảm khi nhiệt độ tăng.

Khả năng chịu nhiệt NTC so với nhiệt độ
- NTC thermistor được làm từ vật liệu bán dẫn (chẳng hạn như oxit kim loại và gốm)
- Hầu hết các cảm biến nhiệt điện trở NTC thường phù hợp với nhiệt độ từ -55 ° C đến + 150 ° C
- Nói chung, NTC thermistors được sử dụng để đo nhiệt độ.
Cách sử dụng NTC Thermistor để đo nhiệt độ
- Mạng phân chia điện áp
Đầu ra của thermistor là thay đổi trong kháng chiến. Sự thay đổi điện trở này có thể được đo bằng cách sử dụng mạng chia điện áp bằng cách thêm một điện trở nối tiếp với điện trở nhiệt được hiển thị bên dưới.

Bây giờ, đo điện áp đầu ra tương tự là một chức năng của sự thay đổi trong sức đề kháng với sự thay đổi về nhiệt độ.
1. Chuyển đổi điện áp analog sang điện trở Thermistor
Làm thế nào để tính toán giá trị điện trở của thermistor?

Ở đây,
Đầu ra ADC - Giá trị số của Vout (từ 0 đến 1023).
Series Resistor - Trong sơ đồ mạch hiển thị ở trên, chúng tôi sử dụng điện trở loạt 10K ohm.
2. Tính Nhiệt độ từ Kháng
Phương trình hốc Steinhart
- Phương trình hinh Steinhart được sử dụng để lấy nhiệt độ chính xác của thermistor vì nó cung cấp một xấp xỉ gần đúng với nhiệt độ thực tế hơn so với phương trình đơn giản, và hữu ích trong toàn bộ phạm vi nhiệt độ làm việc của cảm biến.
- Phương trình hốc Steinhart là,

Ở đây,
T - nhiệt độ trong kelvin
R - logarit tự nhiên của điện trở
A, B và C là các hệ số thu được từ phép đo thực nghiệm.
Làm thế nào để có được giá trị của A, B và C?
- Có nhiều cách khác nhau để có được ba giá trị này.
- Theo phương pháp 'Hiệu chỉnh các hệ số Steinhart-Hart cho Thermistors' (tập tin đính kèm dưới đây), chúng ta có thể đo giá trị điện trở thermistor ở các nhiệt độ khác nhau và có thể tính giá trị A, B, C bằng phương pháp ma trận.
- A, B và C là các hệ số Steinhart-Hart sẽ thay đổi tùy thuộc vào loại và mô hình của điện trở nhiệt.
- Công thức pha màu Steinhart thường chính xác khoảng + - 0,15 ° C, trong khoảng từ -50 ° C đến + 150 ° C, rất hữu ích cho hầu hết các ứng dụng.
- Đối với phạm vi nhiệt độ giảm, 0 ° C đến 100 ° C, chúng tôi sẽ có độ chính xác cao hơn, khoảng + - 0,01 ° C.
Phương trình tham số B
- Nhưng trong phương trình Steinhart-Hart ở trên, chúng ta phải biết hoặc tính toán các biến khác nhau (A, B và C). Vì vậy, chúng ta có thể sử dụng phương trình tham số B sau đây.
- Nó cũng là một phương trình Steinhart-Hart với C = 0.

Ở đây,
Tất cả các nhiệt độ đều ở Kelvin
T0 - Nhiệt độ phòng thí nghiệm tức là 25ºC = 298,15 K
B - Hệ số nhiệt điện trở (được đưa ra trên Thermistor)
R0 - Trở kháng ở nhiệt độ phòng.
ví dụ 10 K NTC có sức đề kháng 10K ở nhiệt độ phòng.
R - Series kháng
Giới thiệu

Cảm biến cặp nhiệt điện
- Cặp nhiệt điện được làm bằng hai dây kim loại khác nhau (thermoelements) nối với nhau ở một đầu gọi là đầu đo (còn được gọi là đầu nối). Một kết thúc khác là tham gia hoặc không tham gia, được gọi là kết thúc tham chiếu mà nhiệt độ được biết đến.

- Sự chênh lệch nhiệt độ giữa hai đầu này tạo ra sự khác biệt về điện áp và điện áp này được sử dụng để đo nhiệt độ.
- Nói chung, các cặp nhiệt điện được sử dụng để đo nhiệt độ trên phạm vi rộng, tức là -270 đến 3000 độ Celsius.
- Cặp nhiệt điện được sử dụng rộng rãi trong các ngành công nghiệp, trong đó bao gồm đo nhiệt độ của ổ ghi, động cơ diesel, lò vv
Nguyên tắc làm việc

- Cặp nhiệt điện bao gồm hai kim loại khác nhau (dây), kim loại A và kim loại B. Các kim loại này được nối với nhau ở đầu cuối gọi là đường giao nhau đo, còn đầu kia được gọi là điểm tham chiếu như trong hình trên.
- Lưu ý rằng đo điểm Junction được sử dụng để đo nhiệt độ. Điểm tham chiếu trong hình là nhiệt độ đã biết.
- Theo hiệu ứng Seebeck , điện áp nhiệt được tạo ra tỷ lệ thuận với chênh lệch nhiệt độ giữa hai mối nối. Điện áp này có thể được đo tại điểm tham chiếu.
- Hiệu ứng Seebeck nói rằng khi hai kim loại khác nhau hoặc không giống nhau được nối với nhau tại hai nút giao nhau, lực điện động (EMF) được tạo ra tại hai nút giao nhau.
Các loại cặp nhiệt điện
- Các loại cặp nhiệt điện phụ thuộc vào các kết hợp và hợp kim nhất định.
- Việc lựa chọn các kết hợp được thúc đẩy bởi chi phí, tính khả dụng, thuận tiện, điểm nóng chảy, tính chất hóa học, tính ổn định và đầu ra.
- Các cặp nhiệt điện khác nhau phù hợp với các loại ứng dụng khác nhau.
- Bảng sau đây cho thấy các loại cặp nhiệt điện khác nhau, nhiệt độ, vật liệu được sử dụng và màu sắc của chúng.
Bảng: Các loại cặp nhiệt điện
Các loại
|
Nhiệt độ
|
Chân tích cực
|
Chân tiêu cực
|
Mã màu
|
Loại B
|
0ºC đến 1700ºC
|
Platinum-30% Rhodium
|
Platinum-6% Rhodium
|
Xám & Đỏ
|
Loại E
|
-100º đến 1000ºC
|
Chromel
|
Constantan
|
Đỏ tím
|
Loại J
|
0 đến 750 ºC
|
Bàn là
|
Constantan
|
Trắng & Đỏ
|
Loại K
|
-100 đến 1300 ºC
|
Chromel
|
Alumel
|
Vàng đỏ
|
Loại N
|
-230 đến 1300 ºC
|
Nicrosil
|
Nisil
|
Cam & Đỏ
|
Loại R
|
0 đến 1600 ºC
|
Platinum-13% Rhodium
|
Bạch kim
|
Đen đỏ
|
Loại S
|
0 đến 1600 ºC
|
Platinum-10% Rhodium
|
Bạch kim
|
Đen đỏ
|
Loại T
|
-200 đến 350 ºC
|
Đồng
|
Constantan
|
Xanh đỏ
|
- Khi các cặp nhiệt điện sinh ra điện áp trong dải uV, chúng ta cần khuyếch đại nó bằng cách sử dụng bộ khuếch đại thiết bị đo đạc.
- Có rất nhiều bộ khuếch đại thiết bị đặc biệt được chế tạo cho các loại kim loại cặp nhiệt điện có sẵn ở dạng IC. ví dụ AD594, AD595, v.v.
- Điểm tham chiếu thường được bù trong mạch tích hợp (IC) cho các ứng dụng công nghiệp.
- Nhiệt độ đường giao nhau lạnh được bù bằng cách tạo ra điện áp bằng điện áp cặp nhiệt ở 0 ° C
Cảm biến độ ẩm đất
Giới thiệu
- Cảm biến độ ẩm đất bao gồm hai tấm dẫn điện hoạt động như một đầu dò và hoạt động như một điện trở biến đổi với nhau.
- Khi cảm biến được đưa vào trong nước, điện trở sẽ giảm và có độ dẫn điện tốt hơn giữa các tấm.

Cảm biến độ ẩm đất
Nguyên tắc làm việc

Nguyên tắc làm việc của cảm biến độ ẩm đất
- Hình trên cho thấy nguyên lý làm việc của cảm biến độ ẩm đất.
- Cảm biến độ ẩm đất có hai tấm dẫn điện. Tấm đầu tiên được kết nối với nguồn + 5Volt qua hàng loạt điện trở của 10K ohm và tấm thứ hai được nối trực tiếp với mặt đất.
- Nó đơn giản hoạt động như một mạng thiên vị chia điện áp, và đầu ra được lấy trực tiếp từ đầu cuối đầu tiên của pin cảm biến, được thể hiện trong hình trên.
- Sản lượng sẽ thay đổi trong khoảng 0 - 5 Volt, tương ứng với sự thay đổi hàm lượng nước trong đất.
- Lý tưởng nhất, khi không có độ ẩm trong đất, cảm biến hoạt động như mạch mở tức là kháng vô hạn. Đối với điều kiện này, chúng tôi nhận được 5V ở đầu ra.
Cảm biến PID
Giới thiệu

Cảm biến PIR
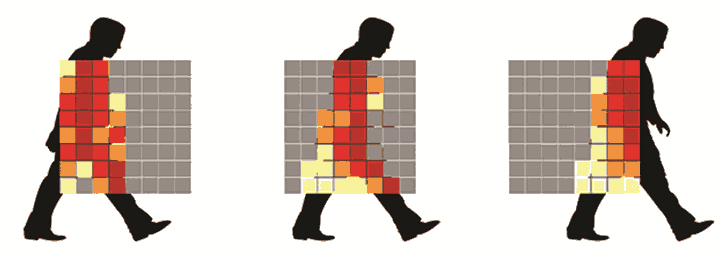
Tất cả các vật thể sống, có nhiệt độ cơ thể lớn hơn 0oC, phát ra nhiệt ở dạng bức xạ hồng ngoại qua cơ thể của chúng, cũng được gọi là bức xạ nhiệt. Năng lượng bức xạ này là vô hình đối với mắt người. Những tín hiệu này có thể được phát hiện bằng cách sử dụng cảm biến PIR được thiết kế đặc biệt cho mục đích đó.
Mắt ảo mắt lưới
Trong cảm biến hồng ngoại thụ động (PIR), từ thụ động chỉ ra cảm biến PIR không tạo ra hoặc tỏa bất kỳ năng lượng nào cho mục đích phát hiện.
Cảm biến PIR không phát hiện hoặc đo " HEAT "; chúng phát hiện bức xạ hồng ngoại phát ra hoặc phản xạ từ vật thể.
Chúng nhỏ, rẻ tiền, công suất thấp và dễ sử dụng. Chúng thường được tìm thấy ở nhà, y tế, các nhà máy vv khu vực.
Cảm biến PIR

PIR khối cảm biến
Yếu tố PIR
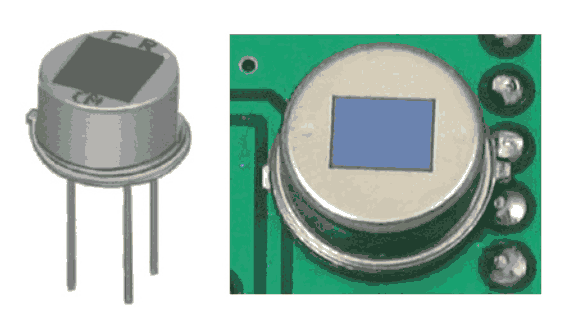
- PIR về cơ bản được làm bằng một cảm biến pyroelectric , có thể phát hiện mức độ bức xạ hồng ngoại.
- Hình trên của phần tử PIR cho thấy kim loại tròn có thể với một tinh thể hình chữ nhật ở trung tâm.
- Mỗi vật thể phát ra một số bức xạ mức thấp, và các vật thể nóng hơn phát ra nhiều bức xạ hơn.
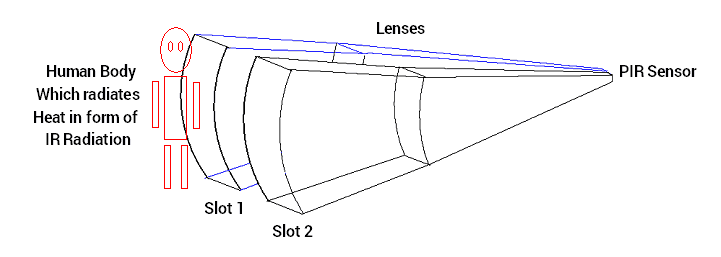
- Cảm biến được chia thành hai khe cắm, được nối dây để chúng có thể loại bỏ lẫn nhau.
- Nếu một nửa nhìn thấy nhiều hơn hoặc ít hơn bức xạ hồng ngoại so với khác, đầu ra sẽ đu cao hoặc thấp.
- Tín hiệu đầu vào từ cả hai đầu cuối của phần tử PIR được khuếch đại bằng mạch khuếch đại và so sánh với mạch so sánh.
- Các yếu tố PIR được bao phủ bởi ống kính để tăng phạm vi hoạt động.
Ở vị trí nhàn rỗi
- Cảm biến chuyển động PIR sử dụng phần tử RE200B để phát hiện hồng ngoại. Cả hai khe của cảm biến này được kết nối với bộ khuếch đại vi sai.
- Khi cảm biến không hoạt động, cả hai khe đều phát hiện cùng một lượng IR.
- Vì vậy, không có tín hiệu lỗi giữa các đầu vào vi sai. Đầu ra của mạch so sánh bằng không.
Object in Motion
- Khi bất kỳ vật thể ấm áp nào đi qua phía trước cảm biến, nó sẽ chặn một khe của cảm biến PIR. Điều này gây ra một sự thay đổi khác biệt tích cực giữa hai khe. Sự thay đổi này được chỉ ra bởi Phần A trong hình dưới đây.
- Khi cơ thể ấm áp rời khỏi khu vực cảm biến, cảm biến tạo ra sự thay đổi khác biệt âm. Sự thay đổi này được chỉ ra bởi Phần B trong hình dưới đây.
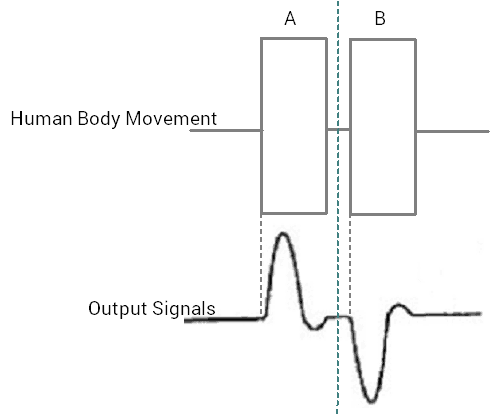
Thay đổi khác biệt giữa hai khe
- Cả hai thay đổi trong xung là phát hiện cơ thể ấm áp tỏa tín hiệu hồng ngoại.
Mô tả pin
Sơ đồ pin của cảm biến PIR
Pin 1 - GND
Chúng ta phải kết nối pin này với Ground.
Pin 2 - Đầu ra
Pin này cho đầu ra (3.5V) khi phát hiện chuyển động.
Pin 3 - VCC
Pin này cung cấp điện áp cung cấp (+ 5v) cho phần tử PIR và mạch bên trong.
Phương thức hoạt động
Cảm biến này có hai chế độ hoạt động:
1. Chế độ kích hoạt đơn
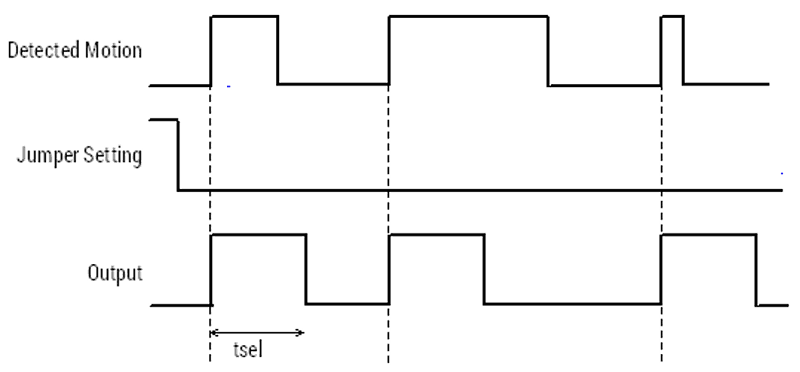
Biểu đồ thời gian chế độ kích hoạt đơn
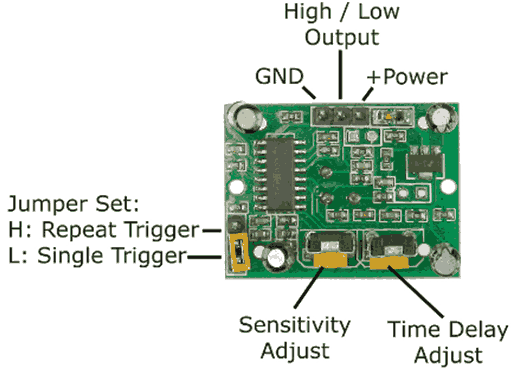
- Để chọn chế độ Kích hoạt đơn, cài đặt jumper trên cảm biến PIR phải được đặt ở mức LOW.
- Trong trường hợp chế độ kích hoạt đơn, ngõ ra HIGH khi phát hiện chuyển động.
- Sau khi trễ cụ thể (tsel), đầu ra sẽ giảm xuống LOW ngay cả khi đối tượng đang chuyển động.
- Đầu ra là LOW một thời gian và một lần nữa đi HIGH nếu đối tượng vẫn còn trong chuyển động.
- Độ trễ này (tsel) được cung cấp bởi người dùng sử dụng bộ chiết áp. Potentiometer này là trên tàu của mô-đun cảm biến PIR.
- Theo cách này, cảm biến PIR cho xung CAO / THẤP nếu đối tượng chuyển động liên tục.
2. Lặp lại chế độ kích hoạt
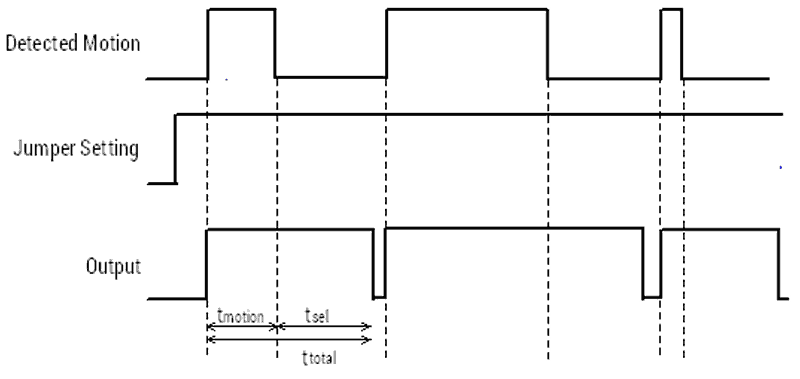
Biểu đồ thời gian chế độ kích hoạt lặp lại
- Để chọn chế độ Kích hoạt lặp lại, cài đặt jumper trên cảm biến PIR phải được đặt ở mức CAO.
- Trong trường hợp lặp lại chế độ kích hoạt, đầu ra đi HIGH khi phát hiện chuyển động.
- Đầu ra của cảm biến PIR là HIGH cho đến khi vật thể đang chuyển động.
- Khi đối tượng dừng chuyển động, hoặc biến mất khỏi vùng cảm biến, PIR tiếp tục trạng thái HIGH của nó lên đến một số độ trễ được chỉ định (tsel).
- Chúng tôi có thể cung cấp độ trễ này (tsel) bằng cách điều chỉnh chiết áp. Potentiometer này là trên tàu của mô-đun cảm biến PIR.
- Bằng cách này, cảm biến PIR cho xung CAO nếu đối tượng đang chuyển động liên tục.
Thay đổi độ nhạy và thời gian trễ
- Có hai chiết áp trên bảng cảm biến chuyển động PIR: Điều chỉnh độ nhạy và điều chỉnh thời gian trễ.
- Nó có thể làm cho PIR nhạy cảm hơn hoặc không nhạy cảm đủ. Độ nhạy tối đa có thể đạt được lên đến 6 mét.
- Time Delay Điều chỉnh Potentiometer được sử dụng để điều chỉnh timetsel được hiển thị trong các biểu đồ thời gian trên.
- Phong trào theo chiều kim đồng hồ khiến PIR trở nên nhạy cảm hơn.
Ống kính
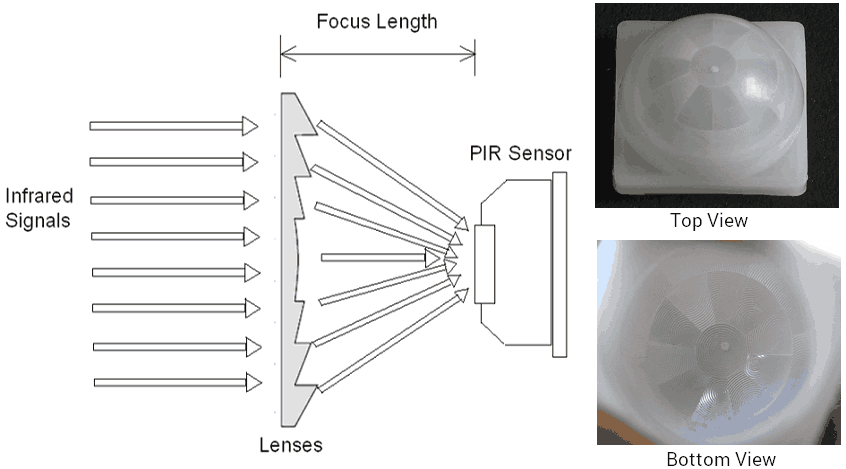
Đầu báo PIR với ống kính Fresnel
- Hai điều quan trọng trong khi sản xuất cảm biến PIR: chi phí thấp và độ nhạy cao.
- Cả hai điều này có thể đạt được một cách kỳ diệu bằng cách sử dụng nắp ống kính.
- Các ống kính tăng phạm vi hoạt động; tăng độ nhạy và thay đổi mô hình của Sensing khác nhau một cách dễ dàng.
Kiểm tra cảm biến PIR
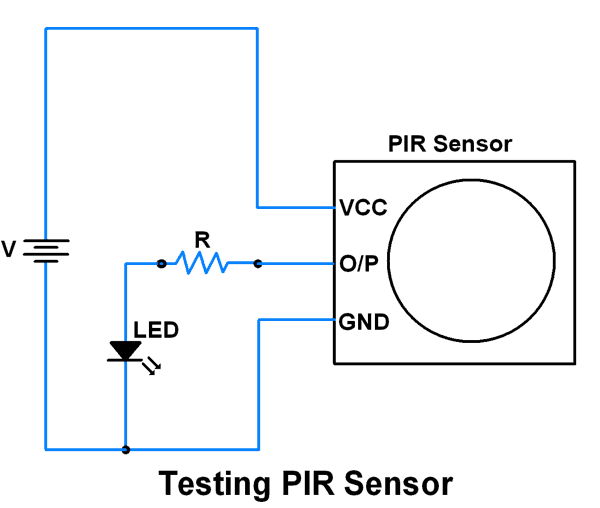
Bây giờ bất cứ khi nào PIR phát hiện chuyển động, đèn LED sẽ sáng khác nó sẽ vẫn OFF được hiển thị dưới đây,
Cảm biến vân tay

Module cảm biến vân tay AS608 đơn giản và dễ sử dụng, có thể giao tiếp hầu hết với các vi điều khiển AVR, PIC, ARM, Arduino, STM32,.... cũng có thể giao tiếp với máy tính qua Serial Port.
Ứng dụng trong hệ thống ra vào ,an ninh bảo vệ
Thông số kỹ thuật:
Giao tiếp UART (TTL)
Kích thước bề chụp vân tay : 14*18mm
Kích thước mẫu vân tay : 512B
Khả năng lưu trữ vân tay : 120(mặc định)
Môi trường làm việc : nhiệt độ -20 đến 50 độ C
Cảm biến quang học
Tỉ lệ nhận dạng : 0.0001%(mức độ bảo mật có thể điều chỉnh)
Tốc độ truyền : 9600BPS
Cảm biến gia tốc - con quay - hồi chuyển
Giới thiệu

MPU-6050 là cảm biến của hãng InvenSense. MPU-6050 là một trong những giải pháp cảm biến chuyển động đầu tiên trên thế giới có tới 6 (mở rộng tới 9) trục cảm biến tích hợp trong 1 chip duy nhất.
MPU-6050 sử dụng công nghệ độc quyền MotionFusion của InvenSense có thể chạy trên các thiết bị di động, tay điều khiển...
MPU-6050 tích hợp 6 trục cảm biến bao gồm:
+ con quay hồi chuyển 3 trục (3-axis MEMS gyroscope)
+ cảm biến gia tốc 3 chiều (3-axis MEMS accelerometer)
Ngoài ra, MPU-6050 còn có 1 đơn vị tăng tốc phần cứng chuyên xử lý tín hiệu (Digital Motion Processor - DSP) do cảm biến thu thập và thực hiện các tính toán cần thiết. Điều này giúp giảm bớt đáng kể phần xử lý tính toán của vi điều khiển, cải thiện tốc độ xử lý và cho ra phản hồi nhanh hơn. Đây chính là 1 điểm khác biệt đáng kể của MPU-6050 so với các cảm biến gia tốc và gyro khác.
MPU-6050 có thể kết hợp với cảm biến từ trường (bên ngoài) để tạo thành bộ cảm biến 9 góc đầy đủ thông qua giao tiếp I2C.
Các cảm biến bên trong MPU-6050 sử dụng bộ chuyển đổi tương tự - số (Anolog to Digital Converter - ADC) 16-bit cho ra kết quả chi tiết về góc quay, tọa độ... Với 16-bit bạn sẽ có 2^16 = 65536 giá trị cho 1 cảm biến.
Tùy thuộc vào yêu cầu của bạn, cảm biến MPU-6050 có thể hoạt động ở chế độ tốc độ xử lý cao hoặc chế độ đo góc quay chính xác (chậm hơn). MPU-6050 có khả năng đo ở phạm vi:
+ con quay hồi chuyển: ± 250 500 1000 2000 dps
+ gia tốc: ± 2 ± 4 ± 8 ± 16g
Hơn nữa, MPU-6050 có sẵn bộ đệm dữ liệu 1024 byte cho phép vi điều khiển phát lệnh cho cảm biến, và nhận về dữ liệu sau khi MPU-6050 tính toán xong.
Các thông số kĩ thuật khác của module MPU-6050
+ Nguồn: 3-5V, trên module MPU-6050 đã có sẵn LDO chuyển nguồn 5V -> 3V
+ Giao tiếp I2C ở mức 3V
+ Khoảng cách chân cắm: 2.54mm
+ Địa chỉ: 0x68, có thể cấp mức cao vào chân AD0 để chuyển địa chỉ thành 0x69
Cảm biến nhiệt độ-độ ẩm
SHT10

Tệp Datasheet cho SHT10
SHT11

SHT15

SHT25
SHT31-D

SHTW2

Tổng quan
SHT10 là cảm biến độ ẩm và nhiệt độ được hiệu chuẩn hoàn toàn. Nó tích hợp các yếu tố cảm biến cho độ ẩm và nhiệt độ cùng với mạch xử lý tín hiệu trong một gói nhỏ. Nó sử dụng một yếu tố cảm biến điện dung để đo độ ẩm tương đối. Để đo nhiệt độ, nó sử dụng cảm biến khoảng cách dải tần.
Nó có bộ ADC 14-bit (Analog-to-Digital Converter) để chuyển đổi dữ liệu tương tự từ các phần tử cảm biến thành các đầu ra kỹ thuật số.SHT10 có giao diện I2C cho phép bộ vi điều khiển máy chủ đọc dữ liệu số và độ ẩm.
Nó cung cấp dữ liệu độ ẩm tương đối với độ phân giải 12 bit và độ chính xác ± 4.5% RH (độ ẩm tương đối). Phạm vi hoạt động là 0 đến 100% RH. Dữ liệu nhiệt độ có độ phân giải 14 bit và độ chính xác ± 0,5 ° C. Phạm vi hoạt động là -40 đến 123,8 ° C.
SHT10 hoạt động trên một nguồn cung cấp trong khoảng 2,4 đến 5,5V.
Nó có thể được sử dụng trong các hệ thống thu thập dữ liệu, ghi dữ liệu, đơn vị giám sát thời tiết, v.v.
Thông số giao diện SHT10

ref từ Datasheet
Sơ đồ khối SHT10

ref từ Datasheet
Tính năng của SHT10
Đầu ra kỹ thuật số
Sự tiêu thụ ít điện năng
Gói loại SMD - reflow solderable
Chất lượng tín hiệu cao cấp, thời gian đáp ứng nhanh và không nhạy cảm với nhiễu bên ngoài (EMC).
Cảm biến được làm bằng một con chip CMOS, vỏ cảm biến bao gồm một nắp LCP với epoxy glob top trên một chất nền FR4
Tuân thủ RoHS và WEEE
SHT11
Tổng quan
SHT11 là cảm biến độ ẩm và nhiệt độ được hiệu chuẩn hoàn toàn. Nó tích hợp các yếu tố cảm biến cho độ ẩm và nhiệt độ cùng với mạch xử lý tín hiệu trong một gói nhỏ. Nó sử dụng một yếu tố cảm biến điện dung để đo độ ẩm tương đối.
Để đo nhiệt độ, nó sử dụng cảm biến khoảng cách dải tần. Nó có bộ ADC 14-bit (Bộ chuyển đổi Analog-to-Digital) để chuyển đổi dữ liệu tương tự từ các phần tử cảm biến thành các đầu ra kỹ thuật số.
SHT11 có giao diện I2C cho phép vi điều khiển máy chủ đọc dữ liệu kỹ thuật số độ ẩm và nhiệt độ. Nó cung cấp dữ liệu độ ẩm tương đối với độ phân giải 12 bit và độ chính xác ± 3% RH (độ ẩm tương đối). Phạm vi hoạt động là 0 đến 100% RH.
Dữ liệu nhiệt độ có độ phân giải 14 bit và độ chính xác ± 0,4 ° C. Phạm vi hoạt động là -40 đến 123,8 ° C.
SHT11 hoạt động trên một nguồn cung cấp trong khoảng 2,4 đến 5,5V.
Nó có thể được sử dụng trong các hệ thống thu thập dữ liệu, ghi dữ liệu, đơn vị giám sát thời tiết, v.v.
Thông số giao diện SHT11

ref từ Datasheet
Sơ đồ khối SHT11

ref từ Datasheet
Tính năng của SHT11
Đầu ra kỹ thuật số
Sự tiêu thụ ít điện năng
Gói loại SMD - reflow solderable
Chất lượng tín hiệu cao cấp, thời gian đáp ứng nhanh và không nhạy cảm với nhiễu bên ngoài (EMC)
Cảm biến được tạo thành từ một chip CMOS, vỏ cảm biến bao gồm một nắp LCP với epoxy glob top trên đế FR4
Tuân thủ RoHS và WEEE
Tổng quan
SHT15 là cảm biến độ ẩm và nhiệt độ được điều chỉnh hoàn toàn. Nó tích hợp các yếu tố cảm biến cho độ ẩm và nhiệt độ cùng với mạch xử lý tín hiệu trong một gói nhỏ. Nó sử dụng một yếu tố cảm biến điện dung để đo độ ẩm tương đối.
Để đo nhiệt độ, nó sử dụng cảm biến khoảng cách dải tần. Nó có bộ ADC 14-bit (Analog-to-Digital Converter) để chuyển đổi dữ liệu tương tự từ các phần tử cảm biến thành các đầu ra kỹ thuật số.SHT15 có giao diện I2C cho phép một vi điều khiển máy chủ đọc dữ liệu số và độ ẩm.
Nó cung cấp dữ liệu độ ẩm tương đối với độ phân giải 12 bit và độ chính xác ± 2% RH (độ ẩm tương đối). Phạm vi hoạt động là 0 đến 100% RH. Dữ liệu nhiệt độ có độ phân giải 14 bit và độ chính xác ± 0,3 ° C. Phạm vi hoạt động là -40 đến 123,8 ° C.
SHT15 hoạt động trên một nguồn cung cấp trong phạm vi từ 2.4 đến 5.5V.
Nó có thể được sử dụng trong các hệ thống thu thập dữ liệu, ghi dữ liệu, đơn vị giám sát thời tiết, v.v.
Thông số giao diện SHT15

ref từ Datasheet
Sơ đồ khối SHT15

ref từ Datasheet
Tính năng của SHT15
Đầu ra kỹ thuật số
Sự tiêu thụ ít điện năng
Gói loại SMD - reflow solderable
Chất lượng tín hiệu cao cấp, thời gian đáp ứng nhanh và không nhạy cảm với nhiễu bên ngoài (EMC)
Cảm biến được tạo thành từ một chip CMOS, vỏ cảm biến bao gồm một nắp LCP với epoxy glob top trên đế FR4
Tuân thủ RoHS và WEEE
SHT25

Tổng quan
SHT25 là cảm biến độ ẩm và nhiệt độ chính xác cao. Nó cung cấp tín hiệu cảm biến được hiệu chỉnh, tuyến tính hóa ở định dạng I2C kỹ thuật số. Nó chứa một cảm biến độ ẩm loại điện dung, một cảm biến nhiệt độ khoảng cách ban nhạc, và mạch tích hợp kỹ thuật số tương tự và kỹ thuật số, tất cả trong một chip duy nhất.
Điều này cung cấp độ chính xác cao và ổn định cũng như tiêu thụ điện năng tối thiểu. Mỗi SHT25 được kiểm tra và hiệu chỉnh riêng. Mỗi thiết bị này có rất nhiều số nhận dạng được lưu trữ trên chip có thể đọc được bằng cách sử dụng lệnh.
Nó có độ phân giải có thể lựa chọn của người dùng 8-12 bit cho độ ẩm tương đối (RH), và 12-14 bit cho nhiệt độ. Độ chính xác độ ẩm tương đối thường là ± 1,8% RH và độ chính xác của phép đo nhiệt độ thường là ± 0,2 ° C.SHT25 có tính năng kiểm tra giúp cải thiện độ tin cậy của truyền thông. Nó có một giao diện kỹ thuật số I2C để giao tiếp với một vi điều khiển máy chủ.
Nó hoạt động trên một nguồn cung cấp trong khoảng 2,1 đến 3,6V.
Nó có thể được sử dụng trong các hệ thống thu thập dữ liệu, ghi dữ liệu, đơn vị giám sát thời tiết, v.v.
Sơ đồ pin SHT25

ref từ Datasheet
Sơ đồ ứng dụng SHT25

ref từ Datasheet
Tính năng của SHT25
Hiệu chỉnh với độ chính xác RH là 1,8%
Đầu ra kỹ thuật số, Giao diện I2C
Sự tiêu thụ ít điện năng
DFN loại gói - reflow solderable
Cảm biến chính nó được làm bằng silicon vỏ bọc của cảm biến bao gồm một khung dẫn Cu mạ và hợp chất khuôn epoxy màu xanh lá cây
Tuân thủ RoHS và WEEE
SHT31-D
Tổng quan
SHT31-D là cảm biến độ ẩm và nhiệt độ chính xác cao. Nó có tính thông minh cao, độ tin cậy và thông số kỹ thuật chính xác được cải thiện so với những người tiền nhiệm của nó. Nó bao gồm xử lý tín hiệu nâng cao, một giao diện nối tiếp I2C với hai địa chỉ có thể lựa chọn và người dùng khác nhau.
Nó hỗ trợ tốc độ truyền thông lên đến 1MHz. Nó cung cấp đầy đủ hiệu chuẩn, tuyến tính, và nhiệt độ bù đầu ra kỹ thuật số. SHT31-D có độ ẩm mở rộng từ 0 đến 100% RH (Độ ẩm tương đối). Phạm vi điển hình là từ 20 đến 80% RH. Nó có độ chính xác ± 2% RH.
Phạm vi nhiệt độ là -40 đến 125 ° C. Độ chính xác của phép đo nhiệt độ là ± 0,2 ° C.
SHT31-D hoạt động trên một nguồn cung cấp trong phạm vi từ 2.4 đến 5.5V.
Nó có thể được sử dụng trong các hệ thống thu thập dữ liệu, ghi dữ liệu, đơn vị giám sát thời tiết, v.v.
Sơ đồ pin SHT31-D

ref từ Datasheet
Sơ đồ ứng dụng SHT31-D

ref từ Datasheet
Tính năng của SHT31-DIS-B
Phạm vi điện áp cung cấp rộng, từ 2,4 V đến 5,5 V
Giao diện I2C với tốc độ truyền thông lên tới 1 MHz và hai địa chỉ có thể lựa chọn của người dùng
Thời gian khởi động và đo nhanh
Gói DFN 8 bit nhỏ
SHTW2
Tổng quan
SHTW2 là cảm biến nhiệt độ và độ ẩm kỹ thuật số. Nó đi kèm trong một gói chip siêu nhỏ. Nó tích hợp một cảm biến độ ẩm điện dung, cảm biến nhiệt độ bandgap, mạch xử lý tín hiệu analog và kỹ thuật số, ADC (Bộ chuyển đổi Analog-to-Digital), bộ nhớ dữ liệu hiệu chuẩn và giao diện I2C trên chip.
Nó có độ ẩm đo từ 0 đến 100% RH (Độ ẩm tương đối) với độ chính xác điển hình là ± 3% RH. Phạm vi đo nhiệt độ là -30 đến 100 ° C với độ chính xác điển hình là ± 0,3 ° C.
SHTW2 hoạt động trên điện áp cung cấp trong khoảng từ 1.62V đến 1.98V.
Nó có thể được sử dụng trong các hệ thống thu thập dữ liệu, dữ liệu đăng nhập, đơn vị giám sát thời tiết, vv
Sơ đồ pin SHTW2

ref từ Datasheet
Sơ đồ ứng dụng SHTW2

ref từ Datasheet
Tính năng của SHTW2
Gói chip lật siêu nhỏ: 1,3 × 0,7 × 0,5 mm3
Hiệu chỉnh và reflow solderable
Tiêu thụ điện năng cực thấp
Power-up và đo lường trong vòng 1 ms
1,8 V cung cấp điện áp
Độ chính xác điển hình: ± 3% RH và ± 0,3 ° C
Phạm vi đo nhiệt độ từ -30 đến 100 ° C
IC cảm biến nhiệt LM35

Cảm biến nhiệt độ LM35
- LM35 là thiết bị đo nhiệt độ có điện áp đầu ra analog tương ứng với nhiệt độ.
- Nó cung cấp điện áp đầu ra ở Celsius (Celsius). Nó không yêu cầu bất kỳ mạch hiệu chuẩn bên ngoài nào.
- Độ nhạy của LM35 là 10 mV / độ Celsius. Khi nhiệt độ tăng, điện áp đầu ra cũng tăng lên.
Ví dụ 250 mV nghĩa là 25 ° C.
- Nó là cảm biến 3 đầu cuối được sử dụng để đo nhiệt độ xung quanh từ -55 ° C đến 150 ° C.
- LM35 cho đầu ra nhiệt độ chính xác hơn đầu ra nhiệt điện trở.
Mô tả pin

VCC: Nguồn cung cấp (4V - 30V)
Out: Nó cho điện áp đầu ra analog tương ứng với nhiệt độ (ở độ C).
GND: Mặt đất
Thiết lập ứng dụng

Ví dụ về giao tiếp LM35
- LM35 interfacing với PIC18F4550
- LM35 Giao diện với ATmega16
- LM35 interfacing với Arduino
LM35 datasheet tải về
Đặc điểm của LM35
Hiệu chỉnh trực tiếp trong Celsius (Celsius)
Yếu tố tỷ lệ tuyến tính + 10 mV / ° C
Độ chính xác đảm bảo 0.5 ° C (ở 25 ° C)
Được xếp hạng trong phạm vi −55 ° C đến 150 ° C
Thích hợp cho các ứng dụng từ xa
Chi phí thấp do Wafer-Level Trimming
Hoạt động từ 4 V đến 30 V
Ít hơn 60-μA xả hiện tại
Thấp tự sưởi ấm, 0,08 ° C trong Still Air
Chỉ phi tuyến tính ± ¼ ° C
Đầu ra có trở kháng thấp, 0,1 Ω cho tải 1 mA
Cảm biến nhiệt độ Ds1721U


Tổng quan
DS1721 là một vi mạch 8 chân sử dụng giao diện nối tiếp hai dây (I2C) để giao tiếp với một vi điều khiển. Nó có chức năng nhiệt kế và nhiệt và cung cấp các chỉ số nhiệt độ của thiết bị ở dạng 12-bit. Nó rất hữu ích trong các ứng dụng liên quan đến giám sát nhiệt độ.
Nó có ba bit địa chỉ (A0-A2) cho phép tối đa 8 IC như vậy được kết nối, do đó cung cấp khả năng tạo thành mạng cảm biến nhiệt độ phân tán.
Chức năng tĩnh nhiệt cho phép người sử dụng có thể lập trình nhiệt độ quá nhiệt và dưới nhiệt độ. Pin Tout sẽ hoạt động khi nhiệt độ vượt quá giá trị nhiệt độ quá cao và vẫn hoạt động cho đến khi nhiệt độ giảm xuống dưới giá trị dưới nhiệt độ. Chúng tôi có thể kết nối quạt hoặc một số thiết bị làm mát khác với đầu ra này nếu cần.
IC có thể làm việc trên một nguồn cung cấp khác nhau, từ 2.7V đến 5.5V.
Đặc điểm của DS1721U
Đo nhiệt độ từ -55 ° C đến + 125 ° C
Độ phân giải nhiệt độ được cấu hình từ 9 đến 12 (mặc định) bit (độ phân giải từ 0,5 ° C đến 0,0625 ° C)
Thời gian chuyển đổi tối đa (độ phân giải 9 bit) là 93,75 ms
Cài đặt ổn định là người dùng có thể xác định được
Dữ liệu được đọc / ghi thông qua giao diện nối tiếp 2 dây (mở các dòng I / O xả); Địa chỉ 3 bit
Phạm vi cung cấp điện rộng (2.7V - 5.5V)
Gói SOIC 8-pin, 150 triệu SOIC và gói µSOP 8 chân
Cảm biến nhiệt độ, độ ẩm DTH11

Cảm biến độ ẩm và nhiệt độ DHT11 là cảm biến rất thông dụng hiện nay vì chi phí rẻ và rất dễ lấy dữ liệu thông qua giao tiếp 1 wire (giao tiếp digital 1 dây truyền dữ liệu duy nhất). Bộ tiền xử lý tín hiệu tích hợp trong cảm biến giúp bạn có được dữ liệu chính xác mà không phải qua bất kỳ tính toán nào. So với cảm biến đời mới hơn là DHT22 thì DHT11 cho khoảng đo và độ chính xác kém hơn rất nhiều.
Thông tin kỹ thuật:
Thông tin kỹ thuật:
- Nguồn: 3 -> 5 VDC.
- Dòng sử dụng: 2.5mA max (khi truyền dữ liệu).
- Đo tốt ở độ ẩm 2080%RH với sai số 5%.
- Đo tốt ở nhiệt độ 0 to 50°C sai số ±2°C.
- Tần số lấy mẫu tối đa 1Hz (1 giây 1 lần)
- Kích thước 15mm x 12mm x 5.5mm.
- 4 chân, khoảng cách chân 0.1''.
Tải về:
Cảm biến nhiệt độ DS18B20


Tổng quan
DS1820, DS18S20 và DS18B20 là các IC tương tự và tất cả đều được sử dụng để đo nhiệt độ. Những công trình trên một nguồn cung cấp trong khoảng 3 đến 5.5V, và cũng có thể làm việc trên sức mạnh ký sinh.
Các DS1820 là một nhiệt kế kỹ thuật số vi mạch mà làm việc trên 1 - dây công nghệ. Đó là một IC rất phổ biến nhưng hiện đã được gỡ bỏ. Nó được thay thế bởi DS18S20 và DS18B20. Đây là những IC nhiệt kế kỹ thuật số tương tự như DS1820 và hoạt động trên công nghệ 1 dây.
DS1820 có độ phân giải 9 bit. Độ phân giải bổ sung có thể đạt được bằng cách đọc hai byte đăng ký bổ sung và thực hiện các phép tính bổ sung bằng cách sử dụng chúng.
DS18S20 là thiết bị thay thế trực tiếp cho DS1820. ADC trong đó là nhà máy được cấu hình để chuyển đổi 12 bit. Dữ liệu 12 bit sau đó được chuyển đổi thành giá trị 9 bit. Có thể đạt được độ phân giải cao hơn (lên đến 12 bit) bằng cách thực hiện các phép tính bổ sung tương tự như các tính toán trong DS1820. DS1820 có thể được thay thế trực tiếp bởi DS18S20 chỉ với những thay đổi nhỏ trong firmware. Thông thường, DS18S20 có thời gian chuyển đổi dài hơn DS1820 (750ms so với 500ms).
DS18B20 có dải nhiệt độ rộng hơn so với DS18S20 (-55 đến 125 ° C so với -55 đến 85 ° C). Nó cung cấp độ phân giải có thể lựa chọn cho người dùng từ 9 bit đến 12 bit. Người dùng có thể chọn độ phân giải mong muốn bằng cách cấu hình thanh ghi cấu hình.
Datasheets được cung cấp trong phần đính kèm. Một ghi chú ứng dụng về sự khác biệt giữa ba DS1820 cũng được cung cấp trong phần Đính kèm.
Sơ đồ ứng dụng DS18B20

Đặc điểm của DS18B20-PAR
Đo nhiệt độ từ -55 ° C đến + 125 ° C
Độ phân giải có thể lập trình từ 9 bit đến 12 bit
Parasitic Power Mode Chỉ yêu cầu 2 chân cho hoạt động (DQ và GND)
Mỗi thiết bị có một mã nối tiếp 64 bit duy nhất được lưu trữ trong ROM trên bo mạch
8-Pin SO (150 mil), 8-Pin µSOP và 3-Pin TO-92 Gói AM2321
Cảm biến nhiệt đô, độ ấm AM2320/2321


Tổng quan
AM2320 là cảm biến độ ẩm và nhiệt độ kỹ thuật số có độ chính xác cao. Nó có hai chế độ giao tiếp, một giao diện I2C tiêu chuẩn và một giao diện 1 dây. Nó rất dễ dàng để chuyển đổi giữa hai chế độ giao tiếp này.
Phạm vi đo độ ẩm của AM2320 là 0 đến 99,9% RH (Độ ẩm tương đối) với độ chính xác ± 3% RH. Đo nhiệt độ của AM2320 là -40 đến 80 ° C với độ chính xác ± 0,5 ° C.
Các tính năng của 3721
I2C tiêu chuẩn và đầu ra bus đơn
Đo độ ẩm và nhiệt độ tương đối
Sự tiêu thụ ít điện năng
Điện áp cung cấp: 5V
Sản lượng hiện tại: 8 mA
Thời gian lấy mẫu: 2.0 s

Tổng quan
AM2321 là cảm biến độ ẩm và nhiệt độ kỹ thuật số có độ chính xác cao. Nó có hai chế độ giao tiếp, một giao diện I2C tiêu chuẩn và một giao diện bus đơn. Phạm vi đo độ ẩm của AM2321 là 0 đến 99,9% RH (Độ ẩm tương đối) với độ chính xác ± 3% RH.
Đo nhiệt độ của AM2321 là -40 đến 80 ° C với độ chính xác ± 0.5 ° C.AM2321 hoạt động trên điện áp cung cấp trong khoảng từ 2.6 đến 5.5V.
Các tính năng của am2321
Kích thước nhỏ
Năng lượng thấp
Hoạt động điện áp thấp
I2C tiêu chuẩn và đầu ra bus đơn
Modul cảm biến siêu âm HC-SR04
Giới thiệu
Cảm biến siêu âm hoạt động trên nguyên tắc của hệ thống SONAR và RADAR được sử dụng để xác định khoảng cách đến một vật thể.
Một cảm biến siêu âm tạo ra sóng âm thanh tần số cao (siêu âm). Khi siêu âm này chạm vào vật thể, nó phản chiếu như tiếng vang được cảm nhận bởi người nhận như trong hình bên dưới.

Nguyên lý làm việc siêu âm
Bằng cách đo thời gian cần thiết cho tiếng vọng để tiếp cận với người nhận, chúng tôi có thể tính toán khoảng cách. Đây là nguyên tắc làm việc cơ bản của mô-đun siêu âm để đo khoảng cách.
Mô-đun siêu âm HC-SR-04

Mô-đun siêu âm
HC-SR-04 có thiết bị phát, thu và điều khiển siêu âm.
Trong mô-đun siêu âm HCSR04, chúng ta phải cung cấp xung kích hoạt, do đó nó sẽ tạo ra siêu âm tần số 40 kHz. Sau khi tạo ra siêu âm tức là 8 xung 40 kHz, nó làm cho echo pin cao. Echo pin vẫn cao cho đến khi nó không nhận được âm thanh echo trở lại. Vì vậy, chiều rộng của echo pin sẽ là thời gian cho âm thanh để đi đến đối tượng và quay trở lại. Một khi chúng ta có được thời gian chúng ta có thể tính toán khoảng cách, như chúng ta biết tốc độ của âm thanh.
HC-SR04 có thể đo được từ 2 cm - 400 cm.
Mô tả pin HC-SR04

VCC - +5 V cung cấp
TRIG - Đầu vào kích hoạt cảm biến. Vi điều khiển áp dụng 10 xung kích hoạt cho mô-đun siêu âm HC-SR04.
ECHO –Đầu ra của cảm biến. Vi điều khiển đọc / giám sát pin này để phát hiện các chướng ngại vật hoặc để tìm khoảng cách.
GND - Đất
Nguyên lý làm việc HC-SR04

HC-SR04 Siêu âm Module Timing Sơ đồ
- Chúng ta cần truyền xung kích hoạt của ít nhất 10 chúng ta tới Pin HC-SR04 Trig.
- Sau đó, HC-SR04 tự động gửi sóng âm thanh 8 kHz 8 và đợi cho đầu ra cạnh tăng ở chân Echo.
- Khi chụp cạnh tăng xảy ra tại pin Echo, hãy khởi động Timer và đợi cạnh rơi trên chốt Echo.
- Ngay khi cạnh rơi xuống được chụp ở chân Echo, hãy đọc số đếm của Bộ hẹn giờ. Số thời gian này là thời gian mà bộ cảm biến yêu cầu để phát hiện một đối tượng và trả về từ một đối tượng.
Bây giờ làm thế nào để tính toán khoảng cách?
Chúng ta biết rằng,

Tốc độ của sóng âm là 343 m / s.
Vì thế,

Tổng khoảng cách được chia cho 2 vì tín hiệu di chuyển từ HC-SR04 đến đối tượng và trả về mô-đun HC-SR-04.
Modul RFI R522 NFC
Giới thiệu

Module RFID RC522 sử dụng IC MFRC522 của Phillip dùng để đọc và ghi dữ liệu cho thẻ NFC tần số 13.56mhz, với mức giá rẻ thiết kế nhỏ gọn, module này là sự lựa chọn hàng đầu cho các ứng dụng về ghi đọc thẻ RFID.
Thông số kỹ thuật:
- Nguồn: 3.3VDC, 13 - 26mA
- Dòng ở chế độ chờ: 1013mA
- Dòng ở chế độ nghỉ: <80uA
- Tần số sóng mang: 13.56MHz
- Khoảng cách hoạt động: 0~60mm(mifare1 card)
- Giao tiếp: SPI
- Tốc độ truyền dữ liệu: tối đa 10Mbit/s
- Các loại card RFID hỗ trợ: mifare1 S50, mifare1 S70, mifare UltraLight, mifare Pro, mifare Desfire
- Kích thước: 40mm × 60mm
Tài liệu tham khảo:
Thư viện: Tải về thư viện github
Modul XBee
Giới thiệu

Mô-đun XBee
XBee radio gia đình bao gồm các mô-đun XBee RF khác nhau. Mỗi có đặc điểm kỹ thuật khác nhau. Nói chung, các mô-đun XBee hoạt động trong băng tần ISM 2,4 GHz (Không được cấp phép). Các mô-đun XBee hỗ trợ giao thức ZigBee dựa trên chuẩn IEEE 802.15.4.
Các mô-đun XBee có tính năng địa chỉ nguồn / đích với hỗ trợ truyền thông unicast và phát sóng. Chúng hỗ trợ điểm tới điểm, trỏ tới đa điểm, ngang hàng với các cấu trúc liên lạc truyền thông.
Mô-đun XBee sử dụng kỹ thuật điều chế DSSS (Direct Sequence Spread Spectrum) để liên lạc. XBee có các tính năng trên bo mạch như chân I / O kỹ thuật số, chân đầu vào ADC tương tự (10 bit), ngõ ra PWM, vv .. Nó có các chân nối tiếp UART để giao tiếp với PC và vi điều khiển serially. Một số mô-đun XBee (ví dụ S2C) cũng hỗ trợ giao diện SPI.
Mô tả pin mô-đun XBee

Cấu hình Pin XBee
Như thể hiện trong hình trên của mô-đun XBee, nó có 20 chân. Mỗi chức năng pin được mô tả trong bảng dưới đây.
Số pin
|
Tên
|
Phương hướng
|
Sự miêu tả
|
|---|---|---|---|
1
|
VCC
|
- -
|
Cung cấp năng lượng
|
2
|
DOUT
|
Đầu ra
|
Dữ liệu UART ra
|
3
|
DIN / CONFIG
|
Đầu vào
|
Dữ liệu UART trong
|
4
|
DO8
|
Đầu ra
|
Đầu ra kỹ thuật số 8
|
5
|
CÀI LẠI
|
Đầu vào
|
Đặt lại mô-đun (xung đặt lại> = 200nS)
|
6
|
PWM0 / RSSI
|
Đầu ra
|
Đầu ra PWM 0 / Chỉ báo cường độ tín hiệu nhận được
|
7
|
PWM1
|
Đầu ra
|
Đầu ra PWM 1
|
số 8
|
Kín đáo
|
- -
|
Không kết nối
|
9
|
DTR / SLEEP_RQ / DI8
|
Đầu vào
|
Kiểm soát giấc ngủ hoặc đầu vào số 8
|
10
|
GND
|
- -
|
Đất
|
11
|
AD4 / DIO4
|
Đầu ra đầu vào
|
Đầu vào tương tự 4 / kỹ thuật số I / O 4
|
12
|
CTS / DIO7
|
Đầu ra đầu vào
|
Điều khiển luồng rõ ràng để gửi hoặc kỹ thuật số I / O 7
|
13
|
ON / SLEEP
|
Đầu ra
|
Chỉ báo trạng thái mô-đun,
Cao = ON, Thấp = SLEEP
|
14
|
VREF
|
Đầu vào
|
Điện áp tham chiếu cho ADC
|
15
|
ASSOCIATE / AD5 / DIO5
|
Đầu ra đầu vào
|
Chỉ số liên quan, đầu vào tương tự 5 hoặc số I / O 5
|
16
|
RTS / AD6 / DIO6
|
Đầu ra đầu vào
|
Điều khiển luồng yêu cầu gửi, đầu vào tương tự 6 hoặc số I / O 6
|
17
|
AD3 / DIO3
|
Đầu ra đầu vào
|
Đầu vào tương tự 3 hoặc số I / O 3
|
18
|
AD2 / DIO2
|
Đầu ra đầu vào
|
Đầu vào tương tự 2 hoặc số I / O 2
|
19
|
AD1 / DIO1
|
Đầu ra đầu vào
|
Đầu vào tương tự 1 hoặc số I / O 1
|
20
|
AD0 / DIO0
|
Đầu ra đầu vào
|
Đầu vào tương tự 0 hoặc số I / O 0
|
Hãy xem chế độ hoạt động của XBee
Chế độ hoạt động
Mô-đun XBee có thể hoạt động ở hai chế độ cụ thể,
- Chế độ trong suốt (lệnh AT)
Trong chế độ Trong suốt, bất kỳ dữ liệu nào có sẵn trên chân DIN đều được truyền trực tiếp tới máy thu (trong trường hợp điểm tới điểm) hoặc máy thu (trong trường hợp điểm đến đa điểm).
- Chế độ Giao diện Lập trình Ứng dụng (API)
Trong chế độ API, dữ liệu được gói trong khung. Khung bao gồm Dấu phân cách bắt đầu, Độ dài khung, Kiểu khung, Dữ liệu, Kiểm tra, vv Cài đặt tham số và phản hồi gửi gói có thể được xem ở chế độ API.
Khi mô-đun XBee hỗ trợ giao thức ZigBee, chúng ta hãy xem về giao thức ZigBee trong ngắn hạn.
Giao thức ZigBee
- Giao thức ZigBee dựa trên các tiêu chuẩn 802.15.4 của IEEE (Viện Kỹ sư Điện và Điện tử) với các chức năng định tuyến và nối mạng bổ sung. Nó được sử dụng để tạo Personal Area Network (PAN) bằng radio.
- ZigBee có chức năng mạng lưới. Mạng lưới được sử dụng khi khoảng cách giữa hai radio vượt quá phạm vi của chúng. Trong trường hợp như vậy, radio trung gian được sử dụng để chuyển tiếp các tin nhắn đến đến đích và hoàn thành việc liên lạc giữa các radio đường dài.
Các thiết bị ZigBee có ba loại theo chức năng của chúng,
- Điều phối viên ZigBee
- Điều phối viên cung cấp đồng bộ hóa mạng bằng các nút bỏ phiếu.
- Điều phối viên chọn một kênh và PAN ID (cả 64-bit và 16-bit) để tạo mạng. Có một Điều phối viên trong mỗi mạng vì nó tạo ra mạng.
- Điều phối viên cho phép các bộ định tuyến và thiết bị kết thúc tham gia mạng và hỗ trợ định tuyến dữ liệu.
- Nó cũng hoạt động như một cây cầu để giao tiếp với một mạng khác.
- ZigBee Router
- Router cần tham gia PAN ZigBee trước khi nó có thể truyền, nhận hoặc định tuyến dữ liệu.
- Sau khi gia nhập, Bộ định tuyến cho phép các bộ định tuyến và thiết bị đầu cuối khác tham gia mạng và hỗ trợ định tuyến / truyền dữ liệu bằng cách hoạt động như radio trung gian.
- Thiết bị đầu cuối ZigBee
- Thiết bị đầu cuối không thể khởi động dữ liệu mạng hoặc tuyến đường.
- Nó luôn luôn truyền hoặc nhận dữ liệu RF thông qua nút cha của nó (Điều phối viên hoặc Bộ định tuyến).
- Do chức năng giới hạn như vậy, nó có thể vào chế độ năng lượng thấp để tiết kiệm điện.
Hãy xem về PAN và Channel trong ZigBee.
PAN ID (ID mạng cá nhân)
- Mạng ZigBee được gọi là Mạng cá nhân hoặc PAN. Mỗi mạng được xác định bằng ID PAN duy nhất của chúng. PAN ID là phổ biến trong tất cả các thiết bị của cùng một mạng.
- Thiết bị ZigBee được cấu hình với PAN ID để tham gia mạng hoặc họ có thể chọn PAN ID gần đó để kết nối với mạng của họ.
- Điều phối viên phải chọn một PAN ID và kênh để bắt đầu một mạng. Điều phối viên và bộ định tuyến có thể cho phép các thiết bị khác tham gia vào mạng.
- Bộ định tuyến hoặc điều phối viên cho phép thiết bị đầu cuối tham gia mạng trở thành "cha mẹ" của thiết bị đầu cuối. Nếu thiết bị đầu cuối ngủ, cha mẹ phải có khả năng đệm các gói dữ liệu đến được định sẵn cho thiết bị cuối cho đến khi thiết bị đầu cuối thức dậy và nhận dữ liệu.
Kênh
Thiết bị ZigBee sử dụng kỹ thuật mã hóa chuỗi nhúng trực tiếp (DSSS) và hoạt động với kênh cố định.
- 16 kênh được phân bổ trong băng tần 2,4 GHz, với mỗi kênh cách nhau 5 MHz, mặc dù chỉ sử dụng băng thông 2 MHz.
- Mô-đun XBee hỗ trợ tất cả 16 kênh và mô-đun XBee-PRO hỗ trợ 14 trong số 16 kênh.
- Điều phối viên có thể tự động quyết định sử dụng ID và kênh PAN nào.
Giải quyết
Bây giờ chúng ta hãy xem một điều quan trọng cần biết trong việc giải quyết các thiết bị XBee. Có hai phương pháp địa chỉ được sử dụng bởi các thiết bị XBee
- Địa chỉ ngắn 16 bit
- Địa chỉ dài 64 bit
Với tính năng truyền thông Unicast và Broadcast.
Địa chỉ ngắn 16 bit
- Địa chỉ ngắn được biết bằng tham số ' MY '.
- Đặt tham số ' DH ' thành 0 sẽ định cấu hình địa chỉ đích thành địa chỉ 16 bit ngắn.
- Đối với hai mô-đun để giao tiếp bằng cách sử dụng địa chỉ ngắn, địa chỉ đích (đặt trong tham số ' DL ') của mô-đun máy phát phải khớp với tham số MY của người nhận như được hiển thị trong bảng bên dưới,
Tham số
|
Mô-đun phát
|
Mô-đun nhận
|
|---|---|---|
MY (Địa chỉ nguồn)
|
0x11
|
0x22
|
DH (Địa chỉ đích cao)
|
0
|
0
|
DL (Địa chỉ đích thấp)
|
0x22
|
0x11
|
Địa chỉ dài 64 bit
- Trong chế độ địa chỉ dài 64 bit, tham số MY bị tắt.
- Tham số địa chỉ nguồn ( SH & SL ) và tham số địa chỉ đích ( DH & DL ) được sử dụng cho giao tiếp như được hiển thị trong bảng bên dưới,
Tham số
|
Mô-đun phát
|
Mô-đun nhận
|
|---|---|---|
SH (Địa chỉ nguồn cao)
|
0x0013A200
|
0x0013A200
|
SL (Địa chỉ nguồn thấp)
|
0x41241D5A
|
0x41241CB2
|
DH (Địa chỉ đích cao)
|
0x0013A200
|
0x0013A200
|
DL (Địa chỉ đích thấp)
|
0x41241CB2
|
0x41241D5A
|
Chế độ phát
- Theo mặc định, XBee hoạt động trong chế độ truyền thông Unicast (điểm tới điểm) hỗ trợ thử lại bất kỳ thông báo bị mất nào.
- Mọi mô-đun XBee trong phạm vi sẽ chấp nhận gói chứa địa chỉ quảng bá.
- Khi được cấu hình để hoạt động trong Chế độ phát sóng, các mô đun nhận không gửi ACK (Lời cảm ơn) và các mô đun truyền không tự động gửi lại các gói như trường hợp trong Chế độ Unicast.
- Để gửi gói phát sóng tới tất cả các mô-đun bất kể địa chỉ 16 bit hoặc 64 bit, hãy đặt địa chỉ đích của mô-đun phát sóng như hình dưới đây.
DH (Địa chỉ cao đích) = 0x00000000
DL (Địa chỉ đích đến) = 0x0000FFFF
Bây giờ chúng ta hãy xem làm thế nào để cấu hình XBee trong cả hai chế độ hoạt động (AT lệnh / API) và trong cả hai loại thiết bị chức năng (Điều phối viên / Router / End Device).
Cấu hình XBee
Để cấu hình XBee trong cả hai chế độ hoạt động và loại chức năng thiết bị, Digi International cung cấp một công cụ phần mềm được gọi là X-CTU. Sử dụng công cụ này, chúng ta có thể cấu hình thiết bị, kiểm tra hiệu suất thiết bị và nâng cấp firmware.
Chúng ta cũng có thể cấu hình các thiết bị XBee thông qua PC / Laptop sử dụng thiết bị đầu cuối nối tiếp dễ dàng trong chế độ vận hành trong suốt (lệnh AT) bằng cách sử dụng các lệnh AT.
Lưu ý rằng thiết bị XBee sẽ chỉ nhập vào chế độ Lệnh sau khi nhận lệnh nối tiếp “+++” và tự động chuyển sang chế độ bình thường sau một khe thời gian có thể điều chỉnh được.
Hãy xem cách thiết lập mạng ZigBee.
Mạng XBee
Để tạo mạng, chúng tôi yêu cầu hai hoặc nhiều thiết bị radio XBee. Ví dụ ở đây chúng tôi lấy hai XBee S2devices từ XB24-ZB sản phẩm gia đình với hai bộ chuyển đổi USB XBee như hình dưới đây.

Bộ tiếp hợp USB XBee
Trước tiên, hãy kết nối cả hai thiết bị XBee với cổng nối tiếp PC / Laptop bằng cáp và bộ điều hợp USB XBee. Bây giờ hãy mở phần mềm X-CTU và nhấp vào  biểu tượng ở phía trên bên trái để thêm thiết bị.
biểu tượng ở phía trên bên trái để thêm thiết bị.
biểu tượng ở phía trên bên trái để thêm thiết bị.
Các thiết bị phát thanh Add cửa sổ sẽ bật lên trong đó chúng ta cần phải lựa chọn cổng USB mà chúng tôi đã gắn thiết bị XBee. Như hình dưới đây.
Đặt tốc độ truyền là 9600 theo mặc định.
Đặt tốc độ truyền là 9600 theo mặc định.
Đặt giá trị của bit dữ liệu, chẵn lẻ và bit dừng.
Vì lợi ích của sự đơn giản giữ tất cả các tham số mặc định như được hiển thị trong hình và nhấp vào kết thúc. Nó sẽ thêm thiết bị XBee đã chọn. Làm thủ tục tương tự để thêm thiết bị XBee thứ hai.

Bây giờ cả hai thiết bị sẽ xuất hiện ở góc trên bên trái của X-CTU và giá trị tham số của chúng ở phía bên tay phải như trong hình bên dưới.
- Ở đây chúng tôi đã cấu hình một thiết bị XBee làm Điều phối viên.
- Và một số khác là End Device.
Cả hai đều được cấu hình trong chế độ minh bạch (lệnh AT).

Để cấu hình thiết bị XBee ở chế độ vận hành khác và thiết lập chức năng, hãy nhấp vào  biểu tượng cập nhật bên cạnh phía trên bên phải. Cập nhật cửa sổ Firmware sẽ xuất hiện như hình bên dưới, nơi chúng ta có thể chọn,
biểu tượng cập nhật bên cạnh phía trên bên phải. Cập nhật cửa sổ Firmware sẽ xuất hiện như hình bên dưới, nơi chúng ta có thể chọn,
biểu tượng cập nhật bên cạnh phía trên bên phải. Cập nhật cửa sổ Firmware sẽ xuất hiện như hình bên dưới, nơi chúng ta có thể chọn,- Họ sản phẩm của thiết bị XBee.
- Chức năng được thiết lập để chọn chế độ vận hành yêu cầu và loại chức năng của thiết bị XBee.
- Và phiên bản firmware.

Sau khi cập nhật các thiết bị XBee với phần mềm chính xác, chúng tôi phải đảm bảo ít nhất ba thông số của các thiết bị XBee đưa ra dưới đây
- Tốc độ truyền phải giống nhau cho mỗi thiết bị.
- PAN ID phải là duy nhất cho tất cả các thiết bị XBee trong cùng một n / w.
- Kênh hoạt động phải giống nhau cho tất cả các thiết bị trong cùng một n / w.
Bây giờ chúng ta hãy thiết lập các tham số XBee tức là PAN ID , Channel ( CH ) và Communicate trong chế độ Unicast sử dụng chế độ địa chỉ 64-bit dài cho cả hai thiết bị XBee như trong hình bên dưới.
- Ở đây chúng tôi đang thiết lập PAN ID = 1234. Điều phối viên sẽ chọn kênh.
- Đối với chế độ địa chỉ dài 64 bit, chúng tôi đang thiết lập các tham số của địa chỉ nguồn điều phối ( SH & SL ) trong các tham số Địa chỉ đích của thiết bị đầu cuối ( DH & DL ) và ngược lại.
- Đừng quên giữ tốc độ Baud giống nhau của các thiết bị trong cùng một mạng.


Bây giờ để kiểm tra giao tiếp, mở giao diện điều khiển bằng cách nhấp vào  biểu tượng được hiển thị ở góc trên bên phải của cửa sổ X-CTU và nhấp vào mở để mở giao diện điều khiển như trong hình bên dưới.
biểu tượng được hiển thị ở góc trên bên phải của cửa sổ X-CTU và nhấp vào mở để mở giao diện điều khiển như trong hình bên dưới.
biểu tượng được hiển thị ở góc trên bên phải của cửa sổ X-CTU và nhấp vào mở để mở giao diện điều khiển như trong hình bên dưới.
Bây giờ gõ tin nhắn từ bảng điều khiển giao diện điều phối, nó sẽ xuất hiện ở cuối bảng điều khiển thiết bị đầu cuối và ngược lại như trong hình dưới đây.

Hoạt động API
Bây giờ chúng ta hãy xem chế độ Giao diện lập trình ứng dụng dựa trên gói (API).
- Trong chế độ API, dữ liệu được cấu trúc trong khung được xác định rõ.
- Nói chung, Khung bắt đầu với một byte Bắt đầu Delimiter (0x7E), sau đó Khung Chiều dài, khung Type, khung dữ liệu và kết thúc với Checksum.
- Mọi dữ liệu đến trước Dấu phân cách bắt đầu sẽ bị hủy.
- Và nếu tổng kiểm tra không chính xác thì dữ liệu sẽ bị loại bỏ.
- Độ dài khung là dữ liệu 2-3 byte cho biết chiều dài khung. Nó được đo từ Frame Type đến Checksum theo byte .
- Kiểu khung là một ID lệnh một byte biểu thị loại khung như khung yêu cầu truyền, khung lệnh AT, khung lệnh Remote AT, khung Trạng thái Modem, khung trạng thái truyền, v.v.
- Dữ liệu khung là dữ liệu hoặc lệnh thực tế cần gửi.
- Checksum là dữ liệu một byte được tính toán và xác minh trên dữ liệu không được thoát. Nó được tính bằng cách thêm tất cả các byte (Không bao gồm dấu phân tách bắt đầu và chiều dài khung,), chỉ giữ 8 bit thấp nhất của kết quả và trừ nó khỏi 0xFF.

Khung API cơ bản
Hãy xem ví dụ về AT Command Frame

Ví dụ về khung lệnh AT
Đây,
Độ dài khung = Độ dài của (Kiểu khung + Khung ID + Lệnh AT) bằng byte
Checksum = 0xFF - (Loại khung + Khung ID + Lệnh AT)
= 0xFF - (0x08 + 0x01 + 0x44 + 0x4C) = 0x66.
Như thể hiện trong hình trên chúng ta có thể kiểm tra cấu trúc khung API và ví dụ về khung lệnh AT. Ví dụ, chúng ta đã kiểm tra tham số DL của thiết bị XBee, mà chúng ta phải gửi trên AT Command Frame tức là chúng ta phải gửi dữ liệu dưới đây tới thiết bị XBee,
0x7E 0x00 0x04 0x08 0x01 0x44 0x4C 0x66.
Lưu ý rằng tùy thuộc vào định danh API / Loại khung, Dữ liệu CMD được phân đoạn trong Dữ liệu, Tùy chọn, Giá trị tham số, Giá trị kỹ thuật số, giá trị tương tự, v.v.
Lưu ý: - Trong chế độ vận hành API (khi thoát), khi gửi hoặc nhận khung dữ liệu UART, các giá trị dữ liệu cụ thể phải được thoát (được gắn cờ) để chúng không ảnh hưởng đến hoạt động của khung dữ liệu UART hoặc UART. Để thoát khỏi một byte dữ liệu gây nhiễu, hãy chèn 0x7D và theo sau nó với byte để thoát khỏi XORed với 0x20.
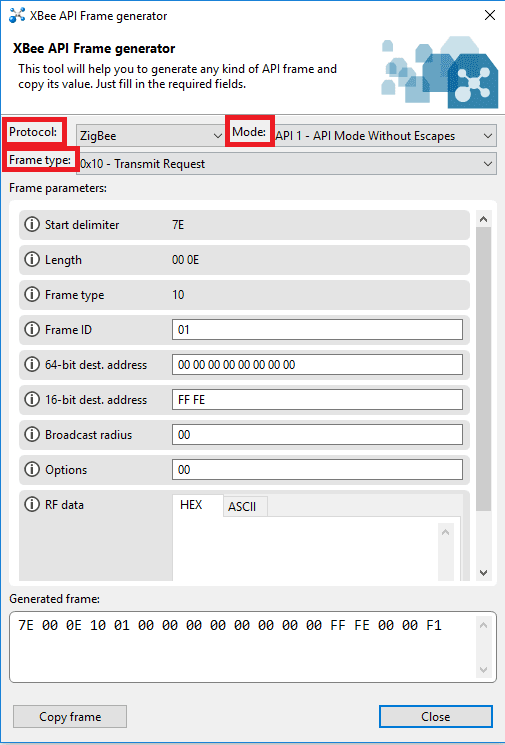
Trình tạo khung API trong X-CTU
X-CTU có công cụ tạo khung API thông qua đó chúng tôi có thể tạo các khung API. Mở các công cụX-CTU và Select -> Bộ tạo khung trong X-CTU như trong hình bên dưới.

Sau khi nhấp vào cửa sổ máy phát điện Khung máy phát XBee API Frame sẽ bật lên nơi chúng tôi có thể tạo khung API dựa trên Giao thức, Chế độ và Loại khung như được hiển thị trong hình bên dưới.
Bây giờ chúng ta hãy xem về hỗ trợ dòng ADC và kỹ thuật số của XBee
ADC và chân I / O kỹ thuật số
Thiết bị XBee có hỗ trợ đường truyền I / O ADC và kỹ thuật số 10 bit. Các chân thiết bị XBee cụ thể có thể được cấu hình theo một trong các chức năng sau,
- ADC
- Khi XBee pin cấu hình như ADC nó có đầu vào tương tự đối với pin Vref của XBee và cho giá trị 10-bit ADC trong I / O Sample Data frame (0x92).
- ADC Vref thay đổi theo mô hình XBee tham khảo ADC Voltages - Đầu vào kỹ thuật số
- Khi pin XBee được định cấu hình dưới dạng Ghim số đầu vào, đầu vào kỹ thuật số trên ghim này và ghi nó vào khung Dữ liệu mẫu I / O. - Đầu ra kỹ thuật số Low
- XBee thiết bị có thể cấu hình chân kích hoạt kỹ thuật số của họ như đầu ra thấp (0) với chức năng này. - Đầu ra kỹ thuật số Cao
- XBee thiết bị có thể cấu hình chân kích hoạt kỹ thuật số của họ như đầu ra cao (1) với chức năng này.
Dữ liệu I / O bắt đầu với tiêu đề trong khung và sau tiêu đề; Dữ liệu mẫu I / O có trong khung như trong hình bên dưới.

Tiêu đề cho biết số lượng mẫu và kênh nào đang hoạt động tại một thời điểm; trong khi dữ liệu mẫu bao gồm dữ liệu số và kỹ thuật số thực tế.
Định cấu hình Ghim XBee
Hãy xem cách cấu hình bất kỳ chức năng pin XBee cụ thể nào từ công cụ XCTU
Chọn pin XBee được cấu hình.
Sau đó chọn chức năng cho pin đó như được hiển thị trong hình ảnh bên dưới và nhấp vào cài đặt ghi

Bây giờ chúng ta hãy xem về lấy mẫu I / O
Lấy mẫu I / O
Các thiết bị XBee có khả năng giám sát và lấy mẫu tất cả các dòng I / O tương tự và kỹ thuật số. Để đọc mẫu I / O từ thiết bị từ xa, thiết bị mẹ phải bật chế độ API. Lấy mẫu I / O chủ yếu được sử dụng để yêu cầu các mẫu tương tự và kỹ thuật số từ đầu XBee.
Có ba cách để lấy mẫu I / O, cục bộ hoặc từ xa:
- Mẫu được truy vấn
Trong quá trình lấy mẫu được truy vấn, thiết bị XBee cha mẹ gửi lệnh (IS) đến thiết bị XBee từ xa. XBee thiết bị đầu cuối mẫu tất cả các kênh i / p kỹ thuật số và tương tự được kích hoạt và gửi nó đến thiết bị cha mẹ XBee. - Lấy mẫu định kỳ Lấy mẫu
định kỳ cho phép thiết bị XBee lấy mẫu tất cả các kênh i / p kỹ thuật số và tương tự đã bật và truyền nó định kỳ tới thiết bị parentXBee. Khoảng thời gian được đặt bởi lệnh IR. - Lấy mẫu phát hiện thay đổi Lấy mẫu
này chỉ được phép cho các kênh kỹ thuật số i / p của thiết bị XBee. Bằng cách cấu hình bất kỳ pin i / p kỹ thuật số nào cho lấy mẫu phát hiện thay đổi, thiết bị XBee có thể gửi các mẫu I / O bất cứ khi nào trạng thái của thay đổi pin kỹ thuật số tức là từ HIGH đến LOW hoặc LOW đến HIGH.
Hỗ trợ tập tin
Giới thiệu
- OLED là diode phát quang hữu cơ phát ra ánh sáng để phản ứng với dòng điện. Màn hình OLED hoạt động không có đèn nền để nó có thể hiển thị các mức đen tối. Nó có kích thước nhỏ và trọng lượng nhẹ hơn so với màn hình tinh thể lỏng
- Màn hình OLED 128x64 là màn hình đồ họa ma trận điểm đơn giản. Nó có 128 cột và 64 hàng làm cho nó hiển thị tổng 128x64 = 8192 pixel. Chỉ cần bật / tắt các điểm ảnh của chúng tôi, chúng ta có thể hiển thị hình ảnh đồ họa của bất kỳ hình dạng nào trên đó.

Màn hình OLED 128x64
Màn hình OLED do IC điều khiển SSD1306 điều khiển. SSD1306 là một trình điều khiển CMOS OLED với bộ điều khiển cho hệ thống hiển thị đồ họa dot-matrix OLED. Do sử dụng trình điều khiển SSD1306, số lượng thành phần bên ngoài được yêu cầu và mức tiêu thụ điện năng đã giảm.
- Màn hình OLED được sử dụng để hiển thị văn bản, hình ảnh và các mẫu khác nhau. Nó cũng thích hợp cho điện thoại di động sub-display, máy nghe nhạc MP3, máy tính vv.
- Màn hình OLED có 256 bước để điều khiển độ sáng.
- Màn hình OLED cũng có sẵn với độ phân giải khác nhau như 128x32, 128x64. Màn hình OLED ở hình trên có độ phân giải 128x64 pixel.
Giao diện có sẵn cho OLED
Mô-đun hiển thị OLED có thể được giao tiếp với vi điều khiển bằng cách sử dụng ba giao diện được đưa ra dưới đây:
6800/8000 series tương thích giao diện song song
Trong giao diện này, gửi / nhận dữ liệu 8 bit có thể được thực hiện thông qua các đường song song tức là D0-D7.
Giao diện I2C
Trong giao diện này, dữ liệu gửi / nhận có thể được thực hiện serially thông qua dòng SDA.
Trong giao diện này, dữ liệu gửi / nhận có thể được thực hiện serially thông qua các dòng SDI và SDO.
Lưu ý: Các mô-đun minh họa ở đây có chân giao diện I2C nên tất cả các cuộc thảo luận dưới đây đang xem xét I2C như là giao tiếp chuẩn.
Có nhiều loại mô-đun OLED khác nhau có sẵn trên thị trường, có độ phân giải khác nhau, giao thức truyền thông (như được thảo luận ở trên Giao diện có sẵn cho phần OLED ) và màu pixel (ví dụ: xanh dương, vàng, trắng). Một số mô-đun cũng hỗ trợ nhiều màu.
Chân hiển thị OLED (giao diện I2C)

Màn hình OLED Pins
SDA (Dữ liệu Nối tiếp):
SDA được sử dụng để truyền dữ liệu giữa chủ và phụ. Dữ liệu và xác nhận được gửi qua SDA.
SCL (Đồng hồ nối tiếp):
Nó là một tín hiệu đồng hồ. Pin này truyền đồng hồ đến slave, SCL. Dữ liệu sẽ được gửi đến các thiết bị khác trên sự kiện đánh dấu đồng hồ. Chỉ thiết bị chính mới có quyền kiểm soát dòng SCL này
VCC:
Đây là pin cấp điện. + Cần cung cấp 3.3V. Hơn 3,3 V nguồn cung cấp có thể làm hỏng màn hình.
GND:
Đây là chân đất. Kết nối mặt đất cung cấp cho pin này.
Địa chỉ I2C của màn hình OLED
Trong thiết bị giao diện I2C được nhận dạng bởi địa chỉ slave của chúng. Màn hình OLED có định dạng địa chỉ nô lệ như hình dưới đây.

Bit SA0 (Slave Address):
- Bit này cung cấp hai tùy chọn địa chỉ nô lệ để lựa chọn.
R / W (Đọc / Ghi) bit:
- Bit này được sử dụng để xác định chế độ hoạt động tức là I2C viết hoặc hoạt động đọc I2C. 1 cho hoạt động đọc và 0 cho hoạt động ghi.
Bây giờ nếu bit SA0 là 0 , thì vi điều khiển có thể thực hiện thao tác đọc / ghi với màn hình OLED sử dụng địa chỉ I2C bên dưới.
- Địa chỉ ghi I2C là 0x78
- Địa chỉ đọc I2C là 0x79
Cấu trúc hiển thị
Màn hình OLED được ánh xạ với GDDRAM của SSD1306.

Cấu trúc trang GDDRAM của SSD1306
GDDRAM (Graphics Display Data RAM) là một bit RAM ánh xạ tĩnh. Nó giữ mẫu bit được hiển thị.
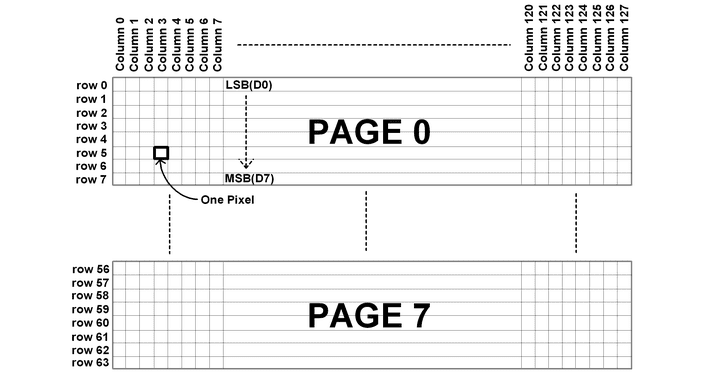
Cấu trúc pixel của màn hình OLED
- Kích thước của GDDRAM là 128 x 64 bit và nó được chia thành tám trang, từ PAGE0 đến PAGE7, được sử dụng cho màn hình ma trận đơn sắc 128x64 dot như trong hình trên.
- Khi một byte dữ liệu (D0-D7) được ghi vào GDDRAM, tất cả các điểm dữ liệu các hàng của cùng một trang của cột hiện tại sẽ được lấp đầy. Dữ liệu bit D0 được viết trên hàng trên cùng, trong khi bit dữ liệu D7 được viết vào hàng dưới cùng như trong Hình
Ánh xạ hàng và cột trên OLED
- Hiển thị có tổng cộng 8 trang, 64 hàng và 128 Cột.
- Mỗi trang chứa 8 hàng và 128 cột như trong hình trên.
- Hiển thị có tổng cộng 128 cột được gọi là phân đoạn.
- Để hiển thị dữ liệu tại địa chỉ trang thiết lập vị trí đầu tiên thành 0 và địa chỉ cột là 0. Chúng ta cũng nên chọn địa chỉ cuối của trang và cột.
- Địa chỉ cuối cùng của trang là 07H và địa chỉ cột tối đa là 7F H.
Các lệnh cho SSD1306
Lưu ý: Các lệnh và trình tự khởi tạo được đưa ra ở đây được khái quát hóa và nó hoạt động cho chúng ta.
Đặt tỷ lệ chia tỷ lệ hiển thị / tần số dao động (0xD5 h):
- Bit 3 đến 0: Hiển thị tỷ lệ chia tỷ lệ đồng hồ (D) Đặt tỷ lệ chia để tạo DCLK (Đồng hồ hiển thị) từ CLK. Tỷ lệ phân chia là từ 1 đến 16, với giá trị đặt lại = 1.
- Bit 7 đến 4: Đặt tần số dao động. Giá trị 4 bit dẫn đến 16 cài đặt tần số khác nhau. Cài đặt mặc định là 1000b.
Đặt tỷ lệ ghép kênh (0xA8 h):
- Lệnh này chuyển chế độ ghép kênh 63 mặc định sang bất kỳ tỷ lệ đa hình nào, từ 16 đến 63.
Đặt dòng bắt đầu hiển thị (0x40 H ~ 0x7F H):
- Lệnh này đặt thanh ghi Display Start Line để xác định địa chỉ bắt đầu của RAM hiển thị, bằng cách chọn giá trị từ 0 đến 63. Trong chương trình của chúng tôi, chúng tôi đặt giá trị này bằng 0 và hàng RAM bản đồ 0 thành COM 0.
Đặt chế độ địa chỉ bộ nhớ (0x20 H):
Có ba chế độ địa chỉ khác nhau trong SSD1306:
- Chế độ giải quyết trang
- Chế độ địa chỉ ngang
- Chế độ địa chỉ dọc
1. Chế độ địa chỉ trang :
- Trong chế độ địa chỉ trang, sau khi RAM hiển thị được đọc / ghi, con trỏ địa chỉ cột được tự động tăng lên 1.
- Nếu con trỏ địa chỉ cột đạt đến địa chỉ kết thúc cột, con trỏ địa chỉ cột được đặt lại thành địa chỉ bắt đầu cột nhưng con trỏ địa chỉ trang không trỏ đến trang tiếp theo.
- Do đó, chúng ta cần phải thiết lập địa chỉ trang và cột mới để truy cập nội dung trang tiếp theo của RAM.
- Chúng tôi cần đặt hai bit thấp hơn thành '1' và '0' cho Chế độ địa chỉ trang.

Di chuyển con trỏ địa chỉ của chế độ địa chỉ trang
Trong chế độ địa chỉ trang, các bước sau được yêu cầu để xác định vị trí con trỏ truy cập RAM bắt đầu:
- Đặt địa chỉ xuất phát của vị trí hiển thị đích theo lệnh B0h thành B7h.
- Đặt địa chỉ cột bắt đầu thấp hơn của con trỏ bằng lệnh 00h ~ 0Fh.
- Đặt địa chỉ cột bắt đầu trên của con trỏ bằng lệnh 10h ~ 1Fh.
Ví dụ: nếu địa chỉ trang được đặt thành B2h, địa chỉ cột thấp hơn là 03h và địa chỉ cột trên là 10 giờ, thì điều đó có nghĩa là cột bắt đầu là SEG3 của PAGE2. Con trỏ truy cập RAM được đặt như trong Hình. Byte dữ liệu đầu vào sẽ được ghi vào vị trí RAM của cột 3.

Ví dụ về cài đặt con trỏ truy cập GDDRAM trong Chế độ địa chỉ trang
2. Chế độ địa chỉ ngang:
- Trong chế độ địa chỉ ngang, sau khi RAM hiển thị được đọc / ghi, con trỏ địa chỉ cột được tự động tăng lên 1.
- Nếu con trỏ địa chỉ cột đạt đến địa chỉ cuối cột, con trỏ địa chỉ cột được đặt lại thành địa chỉ bắt đầu cột và con trỏ địa chỉ trang được tăng thêm 1.
- Khi cả hai con trỏ địa chỉ cột và trang đến địa chỉ kết thúc, con trỏ được đặt lại thành địa chỉ bắt đầu cột và địa chỉ bắt đầu trang
- Chúng ta cần đặt hai chữ số cuối là '0' và '0' cho chế độ địa chỉ ngang .

Di chuyển con trỏ địa chỉ của chế độ địa chỉ ngang
Chế độ địa chỉ dọc:
- Trong chế độ địa chỉ dọc, sau khi RAM hiển thị được đọc / ghi, con trỏ địa chỉ trang được tự động tăng lên 1.
- Nếu con trỏ địa chỉ trang đến địa chỉ kết thúc trang, con trỏ địa chỉ trang được đặt lại về địa chỉ bắt đầu trang và con trỏ địa chỉ cột được tăng thêm 1.
- Khi cả hai con trỏ địa chỉ trang và cột đều đến địa chỉ cuối, con trỏ được đặt lại thành địa chỉ bắt đầu cột và địa chỉ bắt đầu trang.
- Chúng ta cần đặt hai chữ số cuối là '0' và '1' cho chế độ địa chỉ dọc .

Di chuyển con trỏ địa chỉ của chế độ địa chỉ dọc
Trong dữ liệu hiển thị thông thường RAM đọc hoặc ghi và chế độ địa chỉ ngang / dọc , các bước sau đây được yêu cầu để xác định vị trí con trỏ truy cập RAM:
- Đặt địa chỉ bắt đầu và kết thúc cột của vị trí hiển thị đích theo lệnh 21h.
- Đặt địa chỉ xuất phát và kết thúc trang của vị trí hiển thị đích theo lệnh 22h.
Đặt địa chỉ cột (0x21 H):
- Đây là lệnh ba byte. Byte đầu tiên xác định lệnh để thiết lập địa chỉ cột (0x21 H).
- Byte thứ hai xác định địa chỉ bắt đầu cột và byte thứ ba chỉ định địa chỉ cuối cột.
- Lệnh này cũng đặt con trỏ địa chỉ cột thành địa chỉ bắt đầu cột.
Đặt địa chỉ trang (0x22 H):
- Đây là lệnh ba byte. Byte đầu tiên xác định lệnh để thiết lập địa chỉ trang (0x22 H).
- Byte thứ hai chỉ định địa chỉ bắt đầu trang và byte thứ ba là địa chỉ trang cuối.
- Lệnh này cũng đặt con trỏ địa chỉ trang thành địa chỉ bắt đầu trang.
Ví dụ về chuyển động con trỏ địa chỉ cột và hàng:
Trong ví dụ sau, chế độ địa chỉ ngang được sử dụng. Địa chỉ bắt đầu cột được đặt thành 2 và địa chỉ cuối cột được đặt thành 125.
- Địa chỉ bắt đầu trang được đặt thành 1 và địa chỉ kết thúc được đặt thành 6. Trong trường hợp này, phạm vi truy cập cột dữ liệu hiển thị đồ họa là từ cột 2 đến cột 125 và chỉ từ trang 1 đến trang 6.
- Ngoài ra, con trỏ địa chỉ cột được đặt thành 2 và con trỏ địa chỉ trang được đặt thành 1. Sau khi đọc / ghi một pixel dữ liệu, địa chỉ cột được tự động tăng lên 1 để truy cập vị trí RAM tiếp theo cho thao tác đọc / ghi tiếp theo .
- Bất cứ khi nào con trỏ địa chỉ cột kết thúc truy cập vào cột kết thúc 125, nó sẽ được đặt lại về cột 2 và địa chỉ trang được tự động tăng thêm 1.
- Trong khi địa chỉ trang 6 và cột kết thúc 125 RAM được truy cập, địa chỉ trang được đặt lại về 1 và địa chỉ cột được đặt lại về 2.

Ví dụ về di chuyển con trỏ địa chỉ cột và hàng
Đặt điều khiển tương phản (0x81 H):
- Lệnh này đặt Cài đặt tương phản của màn hình. Chip có 256 bước tương phản từ 00h đến FF H. Dòng sản lượng hiện tại tăng khi giá trị bước tương phản tăng lên.
Đặt thời gian sạc trước (0xD9 H):
- Lệnh này được sử dụng để đặt thời lượng của khoảng thời gian tính phí trước. Khoảng thời gian được tính bằng số DCLK, trong đó RESET bằng 2 DCLK.
Đặt VCOMH Deselect Level (0xDB H):
- Lệnh này điều chỉnh đầu ra bộ điều chỉnh VCOMH.
Toàn bộ màn hình hiển thị trên (0xA4 H / 0xA5 H):
- Lệnh A4 h tiếp tục hiển thị toàn bộ màn hình “ON”.
- Lệnh A5 h buộc toàn bộ màn hình phải “ON”, bất kể nội dung của RAM dữ liệu hiển thị.
Đặt Hiển thị thông thường / nghịch đảo (0xA6h / 0xA7h):
- Lệnh A6 h là để hiển thị bình thường.
- Lệnh A7 h là để hiển thị nghịch đảo.
Đặt BẬT / TẮT Hiển thị (0xAE H / 0xAF H):
- AE h: Đặt màn hình OFF.
- AF h: Đặt BẬT màn hình
Lưu ý: Xóa màn hình OLED vì nó có thể in giá trị rác nếu không rõ.
Cảnh báo:
- Bit dữ liệu, được truyền trong mỗi xung SCL, phải giữ ở trạng thái ổn định trong khoảng thời gian “CAO” của xung đồng hồ.
- Ngoại trừ trong điều kiện bắt đầu hoặc dừng, dòng dữ liệu có thể được chuyển đổi chỉ khi SCL là LOW.
- Cả hai dòng dữ liệu (SDA) và đường đồng hồ (SCL) nên được kéo lên bởi các điện trở bên ngoài.
Hỗ trợ tập tin
Modul từ HMC5883L
Giới thiệu
Một từ kế được sử dụng như một la bàn trong điện thoại di động, hệ thống định vị trong xe để chỉ đường.

Mô-đun từ kế HMC5883L
Một từ kế được sử dụng để đo hướng từ trường trong không gian. Hầu hết các hệ thống định vị đều sử dụng la bàn điện tử để xác định hướng đi. Nó có một số loại như fluxgate, magnetoresistive, magneto-inductive và những thứ khác.
Nguyên tắc làm việc
Từ trường của trái đất có mặt trong không gian hướng về phía bắc từ tính như trong hình dưới đây. Dây dẫn mang dòng điện cũng tạo ra từ trường xung quanh chính nó. Do đó, bất cứ khi nào một dây dẫn dẫn dòng điện được đặt trong không gian, nó trải nghiệm ảnh hưởng của từ trường trái đất ảnh hưởng đến dòng chảy của các electron thông qua dây dẫn đó. Những thay đổi này trong dòng chảy của các electron được sử dụng để xác định nhóm hoặc hướng của từ trường. Đây là nguyên tắc làm việc cơ bản của từ kế.
3-trục kỹ thuật số la bàn IC HMC5883L
- HMC5883L sử dụng cảm biến từ tính được sắp xếp trong một mạch cầu nối, được làm bằng vật liệu niken-sắt (phim từ tính Ni-Fe).
- Điện trở của nó thay đổi theo sự thay đổi trong từ trường được áp dụng.
- Phong trào phóng xạ của vật liệu niken-sắt trong không gian trải nghiệm từ trường của trái đất làm thay đổi sức đề kháng của vật liệu, và do đó chúng ta nhận được những thay đổi điện thế kết quả trên cầu. Sự thay đổi điện áp này được sử dụng để có được hướng từ trường trong không gian.
Các thành phần của từ trường trái đất (Hx, Hy) song song với bề mặt trái đất và được sử dụng để xác định hướng la bàn. Chỉ các thành phần X và Y của trường trái đất được sử dụng để xác định góc phương vị hoặc hướng la bàn.

Từ trường của Trái đất
Phương vị (x = 0, y <0) = 90
Phương vị (x = 0, y> 0) = 270
Phương vị (x <0) = 180 - [arc tan (y / x)] * 180 / π
Phương vị (x> 0, y <0) = - [arc tan (y / x)] * 180 / π
Phương vị (x> 0, y> 0) = 360 - [arc tan (y / x)] * 180 / π
Trong đó cho góc phương vị (α) từ 0 đến 360 độ theo hướng X so với hướng bắc từ tính.
Với điều này, chúng ta hãy xem một số tính năng của HMC5883L như,
- Nó có thể được sử dụng cho la bàn chi phí thấp và từ kế.
- Nó có độ chính xác tiêu đề 12-bit và la bàn của la bàn là từ 1 ° đến 2 °.
- Nó có công nghệ Anootropic Magneto Resistive (AMR) của Honeywell cung cấp độ chính xác về độ nhạy và tuyến tính của trục.
- Nó sử dụng giao thức truyền thông I2C để giao tiếp với vi điều khiển.

Mô-đun HMC5883L có năm chân như hình trên,
VCC : Kết nối nguồn 5V DC với chân này.
GND : Nối đất với chân này.
SCL : Kết nối đồng hồ nối tiếp ra khỏi thiết bị chính với ghim này.
SDA : Kết nối dòng dữ liệu nối tiếp từ thiết bị chính đến ghim này.
DRDY : Dữ liệu trạng thái sẵn sàng của dữ liệu sẵn sàng từ mô-đun đến thiết bị chính.
Thiết bị này được điều khiển thông qua thanh ghi trên chip, được hiển thị trong bảng bên dưới:
Địa chỉ
|
Tên
|
Truy cập
|
|---|---|---|
00
|
Đăng ký cấu hình A
|
Đọc viết
|
01
|
Cấu hình đăng ký B
|
Đọc viết
|
02
|
Chế độ đăng ký
|
Đọc viết
|
03
|
Đầu ra dữ liệu X MSB Đăng ký
|
Đọc
|
04
|
Đầu ra dữ liệu X Đăng ký LSB
|
Đọc
|
05
|
Đầu ra dữ liệu Z MSB Đăng ký
|
Đọc
|
06
|
Đầu ra dữ liệu Z LSB Đăng ký
|
Đọc
|
07
|
Đầu ra dữ liệu Y MSB Đăng ký
|
Đọc
|
08
|
Đầu ra dữ liệu Y LSB Register
|
Đọc
|
09
|
Đăng kí trạng thái
|
Đọc
|
10
|
Đăng ký nhận dạng A
|
Đọc
|
11
|
Đăng ký nhận dạng B
|
Đọc
|
12
|
Đăng ký nhận dạng C
|
Đọc
|
Từ bảng trên,
- Cấu hình Đăng ký A được sử dụng để thiết lập tốc độ đầu ra dữ liệu và chế độ đo của mô-đun.
- Cấu hình Đăng ký B được sử dụng để thiết lập độ lợi của thiết bị.
- Chế độ đăng ký được sử dụng để thiết lập chế độ hoạt động của HMC5883L như chế độ Chờ, chế độ đo đơn, chế độ đo liên tục.
- Các thanh ghi đầu ra dữ liệu được sử dụng để lưu trữ các giá trị trục X, Y và Z. Khi các giá trị này rộng 16 bit, các giá trị đó được lưu trữ trong hai thanh ghi 8 bit. Vì vậy, chúng ta cần đọc từng giá trị trục từ hai thanh ghi 8 bit. Các giá trị này nằm trong dạng bổ sung của 2, nghĩa là chúng ta cần sao chép nó trong biến ký 16 bit để nhận giá trị thập phân.
- Thanh ghi trạng thái cung cấp trạng thái sẵn sàng cho thiết bị và trạng thái của thanh ghi đầu ra dữ liệu tức là liệu nó có bị khóa hay không.
- Đăng ký nhận dạng được sử dụng để nhận dạng thiết bị.
Góc nghiêng
Như thể hiện trong hình từ trường của trái đất, phía bắc thực (trục quay của trái đất) và phía bắc từ tính khác nhau. Tại các địa điểm khác nhau trên trái đất, từ phía bắc và phía bắc thực có thể khác nhau tới ± 25 độ. Sự khác biệt này được gọi là góc nghiêng.
Vì la bàn của chúng tôi trỏ tới từ trường phía bắc, không phải là một hướng bắc thực, để tìm một góc tiêu đề thực sự, chúng ta cần phải thêm góc nghiêng ở góc tiêu đề tính từ HMC5883l.
Tìm góc nghiêng cho các vị trí địa lý khác nhau từ trang web: http://www.magnetic-declination.com
Ví dụ, nếu chúng ta đang tính toán hướng đi từ vị trí thành phố Pune, bang Maharashtra, Ấn Độ thì góc nghiêng là (-0 ° 23 ').
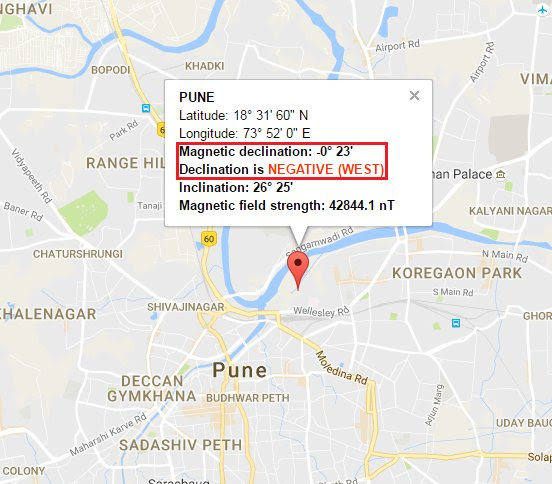
Chuyển đổi góc từ dạng Minute Minute thành dạng rạng rỡ. Để làm được điều đó, chúng tôi có thể tham khảo trang web ( http://www.wolframalpha.com )
Do đó, hướng bắc từ tính cho vị trí này sẽ là
-0 ° 23 '= 6.69mrad nghĩa là 0.00669rad.
Vì vậy, True Heading = từ Bắc Heading + (-0.00669)
Giao tiếp với HMC5883L
HMC5883L sử dụng giao thức I2C để giao tiếp. HMC5883L hoạt động như một thiết bị nô lệ. Địa chỉ thiết bị I2C của nó là 0x1E. Các địa chỉ hoạt động đọc và ghi của nó là:
Địa chỉ ghi thiết bị nô lệ (SLA + W) : 0x3C
Địa chỉ đọc thiết bị Slave (SLA + R) : 0x3D
Hỗ trợ tập tin
Modul Gia tốc ADXL335
Giới thiệu
Một gia tốc là một thiết bị điện sẽ đo lực gia tốc. Nó cho thấy gia tốc, chỉ vì nguyên nhân của lực hấp dẫn tức là lực g. Nó đo gia tốc trong đơn vị g.

Máy đo tốc độ ADLX335
Trên trái đất, 1g có nghĩa là gia tốc 9,8 m / s2 có mặt. Trên mặt trăng, nó là 1/6 của trái đất và trên mars nó là 1/3 của trái đất.
Gia tốc kế có thể được sử dụng cho các ứng dụng cảm biến độ nghiêng cũng như gia tốc động do chuyển động, sốc hoặc rung.
Mô-đun ADXL335
- ADXL335 cho phép đo gia tốc 3 trục hoàn chỉnh.
- Mô-đun này đo gia tốc trong phạm vi ± 3 g ở trục x, y và z.
- Các tín hiệu đầu ra của mô-đun này là các điện áp tương tự tỷ lệ thuận với gia tốc.
- Nó chứa một cảm biến gia công vi bề mặt polysilicon và mạch điều hòa tín hiệu.

- Như chúng ta có thể thấy từ hình trên, cấu trúc cơ bản của gia tốc kế bao gồm các tấm cố định và các tấm di chuyển (khối lượng).
- Tăng tốc làm lệch hướng khối lượng di chuyển và sự mất cân đối của tụ điện vi sai dẫn đến biên độ điện áp đầu ra của cảm biến tỷ lệ thuận với gia tốc.
- Các kỹ thuật giải điều chế nhạy cảm pha được sử dụng để xác định độ lớn và hướng của gia tốc.
Mô-đun tăng tốc ADXL335

VCC: Pin nguồn điện tức là kết nối 5V ở đây.
X_OUT: Đầu ra tương tự trục X.
Y_OUT: Đầu ra tương tự trục Y.
Z_OUT: Đầu ra analog trục Z.
GND: Ground pin tức là kết nối mặt đất ở đây.
ADXL335 gia tốc cung cấp điện áp tương tự ở đầu ra X, Y, Z chân; tỷ lệ thuận với gia tốc theo các hướng tương ứng tức là X, Y, Z.
Góc sử dụng ADXL335
Chúng ta có thể tính góc nghiêng hoặc độ nghiêng bằng cách sử dụng giá trị X, Y, Z. Ngoài ra, chúng ta có thể tính toán góc cuộn, Pitch và Yaw đối với trục X, Y và Z. Vì vậy đầu tiên chúng ta cần chuyển đổi các giá trị ADC 10 bit thành đơn vị g.
Theo mức độ điện áp tối đa của bảng dữ liệu ADXL335 tại 0g là 1.65V và hệ số độ nhạy của 330mV / g.
Công thức trên cho chúng ta giá trị gia tốc trong đơn vị g cho trục X, Y và Z là,
Axout = (((giá trị ADC trục X * Vref) / 1024) - 1,65) / 0,30
Ayout = (((giá trị ADC trục Y * Vref) / 1024) - 1,65) / 0,30
Azout = (((giá trị ADC trục Z * Vref) / 1024) - 1,65) / 0,30
Lưu ý rằng, thực tế chúng ta nhận được điện áp hơi khác nhau ở 0g. Vì vậy, đặt giá trị thực tế của điện áp tại 0g.
Góc nghiêng
- Góc nghiêng có nghĩa là góc nghiêng thiết bị nghiêng từ mặt phẳng bề mặt của nó.
- Góc nghiêng được thể hiện trong hình bên dưới.
- Để tính góc nghiêng của trục X, Y, Z so với tham chiếu, chúng ta cần sử dụng các công thức dưới đây.
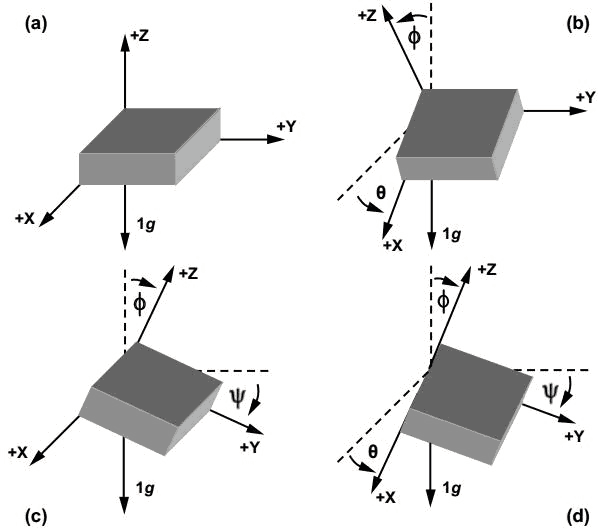
Góc nghiêng có thể được tính là,



Chúng ta có những góc này theo radian. Vì vậy, nhân các giá trị này bằng (180 / π) để lấy góc theo độ trong phạm vi từ -90 ° đến + 90 ° mỗi trục.
Góc quay
Bây giờ chúng ta hãy tìm một góc quay hoàn chỉnh (0 ° đến 360 °) xung quanh trục X, Y, Z, mà chúng ta cũng có thể gọi là,
- Roll - Góc quay dọc theo trục X
- Pitch - Góc quay dọc theo trục Y
- Yaw - Góc quay dọc theo trục Z
Tất cả chúng được thể hiện trong sơ đồ khái niệm dưới đây.
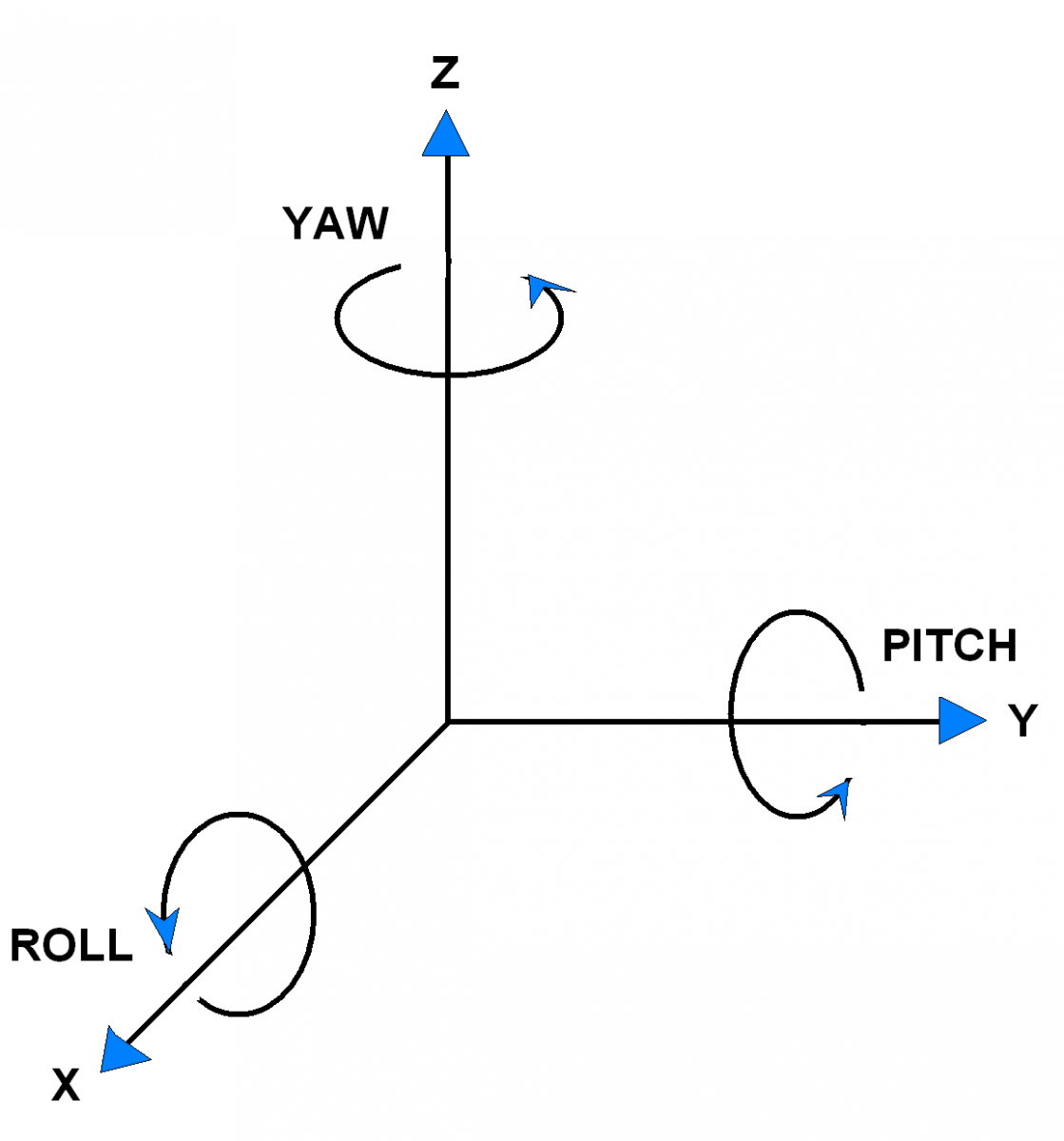
Các góc này theo độ và có thể đọc được vòng quay hoàn chỉnh.
Bây giờ hãy tính các góc này. Khi chúng ta nhận được Θ, Ψ và Φ trong khoảng -90 ° đến + 90 °. Ở đây chúng ta cần phải thực hiện các giá trị này trong khoảng từ -180 ° đến + 180 ° để chúng ta có thể tính toán góc xoay 360 ° hoàn chỉnh. Hãy tính toán các hàm này với hàm tiếp tuyến arc có thể được biểu diễn bằng,
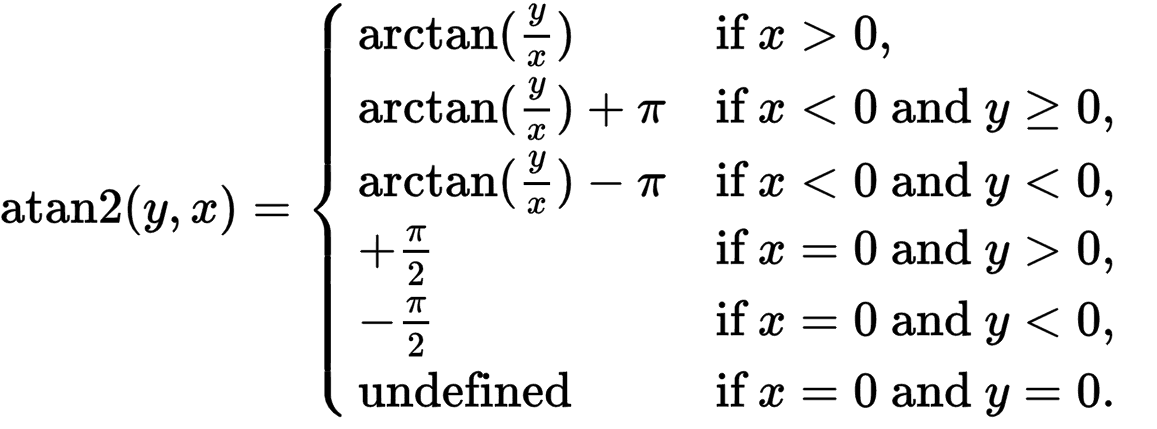
Hàm này sẽ tạo kết quả trong phạm vi-π đến π. Những giá trị này trong radian chúng ta có thể chuyển đổi thành độ bằng cách nhân nó với hệ số (180 / π ≈ 57.29577951). Vì vậy, ở đây chúng tôi nhận được giá trị trong -180 ° đến + 180 °, và chúng tôi có thể chuyển đổi nó để hoàn thành 0 ° đến 360 ° bằng cách chỉ cần thêm 180 ° đến phạm vi.
Do đó, chúng tôi nhận được Roll, Pitch và yaw như,
Roll = (atan2 (Ayout, Azout)) * 57.29577951 + 180
Pitch = (atan2 (Azout, Axout)) * 57.29577951 + 180
Yaw = (atan2 (Axout, Ayout)) * 57.29577951 + 180
Lưu ý rằng , quay dọc theo trục X (roll) và Y (pitch) sẽ tạo ra thay đổi về gia tốc nhưng xoay cùng với trục Z (yaw) sẽ không tạo ra bất kỳ thay đổi nào về gia tốc khi nó vuông góc với mặt phẳng của bề mặt. Do đó chỉ sử dụng gia tốc kế, yaw không thể tính toán được.
Chúng ta cũng có thể thấy hiệu ứng này trên trục X và Y khi các trục này được tạo vuông góc với mặt phẳng của bề mặt.
Modul thời gian thực RTC DS1307
Giới thiệu
- Đồng hồ thời gian thực (RTC) được sử dụng để theo dõi ngày giờ hiện tại. Nó thường được sử dụng trong máy tính, máy tính xách tay, điện thoại di động, các thiết bị ứng dụng hệ thống nhúng, v.v.
- Trong nhiều hệ thống nhúng, chúng ta cần đặt dấu thời gian trong khi ghi dữ liệu tức là giá trị cảm biến, tọa độ GPS, vv .. Để nhận được dấu thời gian, chúng ta cần sử dụng RTC (Đồng hồ thời gian thực).
- Một số vi điều khiển như LPC2148, LPC1768 vv, có trên RTC trên chip. Nhưng trong các vi điều khiển khác như PIC, ATmega16 / 32, chúng không có RTC trên chip. Vì vậy, chúng ta nên sử dụng chip RTC bên ngoài
- Có nhiều loại IC khác nhau được sử dụng cho RTC như DS1307, DS12C887 vv. Trong phần này chúng ta sẽ thấy DS1307.

Mô-đun RTC DS1307
Sơ đồ pin RTC DS1307
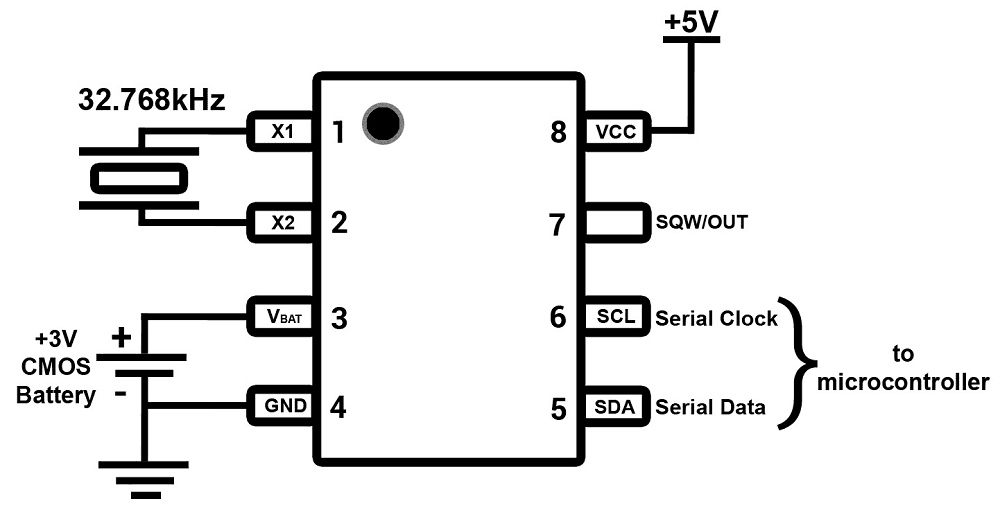
DS1307 RTC Sơ đồ pin
- Các RTC DS1307 là 8 pin IC, thể hiện trong hình trên.
- RTC DS1307 sử dụng tinh thể bên ngoài của tần số 32.768 kHz, vì vậy chúng ta cần kết nối tinh thể với 32.768 kHz tới pin X1 và X2.
- Kết nối pin 3 Volt CMOS với chân Vbat. RTC DS1307 có cơ chế sẵn có để phát hiện 5 volt VCC, nếu bên ngoài 5 volt VCC là không có, sau đó nó có nguồn cung cấp từ 3 volt CMOS pin.
- Các chân SDA (Serial Data) và SCL (Serial Clock) là các chân giao tiếp nối tiếp I2C được sử dụng để kết nối với các chân I2C của vi điều khiển.
- Pin SQW / OUT là trình điều khiển đầu ra sóng vuông. Pin SQW / OUT xuất ra một trong bốn tần số sóng vuông 1Hz, 4kHz, 8kHz, 32kHz bằng cách đặt bit đăng ký nội bộ.
Nói chung, trong khi sử dụng RTC (Real Time Clock) lần đầu tiên, chúng ta cần phải đặt thời gian và ngày hiện tại trong RTC. Sau đó, RTC tiếp tục cập nhật các giá trị này trong vài giây. Trong RTC DS1307, chúng ta có thể thiết lập thời gian này và ngày trong Máy chấm công Register . Sau khi thiết lập giá trị thời gian và ngày, RTC DS1307 tiếp tục cập nhật nó trong vài giây để chúng tôi sẽ nhận được thời gian cập nhật sau.
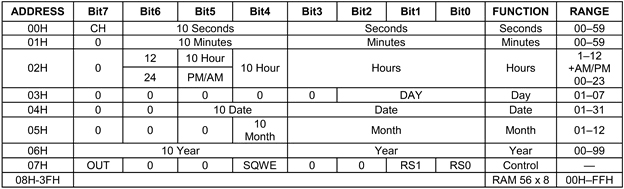
Máy chấm công
- Nội dung của thanh ghi thời gian là ở định dạng BCD (Giá trị nhị phân được mã hóa thập phân).
- Có tổng số tám thanh ghi trong sổ đăng ký máy chấm công để cài đặt giây, Phút, Giờ, Ngày, Ngày, Tháng, năm và kiểm soát.
- Khi chúng tôi đặt giá trị của các thanh ghi này, chúng sẽ tiếp tục cập nhật và chúng tôi có thể đọc các thanh ghi này để nhận các giá trị cập nhật.
Từ biểu dữ liệu
Địa chỉ - 00H: 02H: Đăng ký đồng hồ
Địa chỉ - 00H:
- Trong bit đăng ký bit-7 này là bit CH, là bit kích hoạt / vô hiệu dao động tinh thể, khi nó bằng 0, bộ dao động tinh thể được kích hoạt nếu không dao động không được kích hoạt, vì vậy chúng ta luôn thực hiện bit này trong khi sử dụng RTC.
- Các bit khác được sử dụng để đọc / ghi phần thứ hai. Khi máy chấm công đăng ký lưu trữ giá trị theo định dạng BCD, ở đây Bit- 4 đến Bit-6 lưu trữ số BCD trên của số giây (giá trị từ 0 đến 5), và Bit- 0 đến Bit-3 lưu trữ số BCD thấp hơn của giây ( giá trị từ 0 đến 9). Giá trị giây bắt đầu từ 00 và kết thúc ở mức 59.
Địa chỉ - 01H:
- Địa chỉ này được sử dụng để đọc / ghi giá trị phút.
- Chữ số BCD trên phút được lưu trong Bit-4 đến Bit-6 và số BCD thấp hơn được lưu trong Bit-0 đến Bit- 3
Địa chỉ - 02H:
- Địa chỉ này được sử dụng để đọc / ghi giờ.
- Đồng hồ có thể chạy ở định dạng 12Hr hoặc 24Hr.
- Định dạng 12 giờ : Để đặt định dạng đồng hồ 12 giờ, chúng ta cần đặt Bit- 6 thành logic 1. Trong định dạng đồng hồ 12 giờ Bit-5 sẽ cho biết AM / PM, Logic 1 là cho PM và Logic 0 là cho AM . Bit-4 được chỉ định là 10 giờ, để lưu trữ số có giá trị giờ cao hơn, là 0 hoặc 1 trong trường hợp hệ thống 12 giờ. Bit-0 đến Bit- 3 lưu giá trị của chữ số thấp hơn của giờ (giá trị từ 0 đến 9).
- Định dạng 24 giờ: Để đặt định dạng đồng hồ 24 giờ, chúng tôi cần đặt lại Bit- 6 thành logic 0. Bit-4 và Bit- 5 được chỉ định là 10 giờ, để lưu trữ số có giá trị giờ cao hơn, là 0 đến 2 trong trường hợp hệ thống 24 giờ. Bit-0 đến Bit- 3 lưu giá trị của chữ số thấp hơn của giờ (giá trị từ 0 đến 9).
Địa chỉ - 03H: 06H: Đăng ký Lịch
Địa chỉ - 03H:
- Địa chỉ này được sử dụng để đọc / ghi giá trị ngày từ 1 đến 7. Bit-0 đến Bit-2 được sử dụng để đọc / ghi giá trị ngày.
Địa chỉ - 04H:
- Địa chỉ này được sử dụng để đọc / ghi giá trị ngày tháng. Bit-4 và Bit-5 được sử dụng để đọc / ghi giá trị chữ số trên của ngày (giá trị từ 0 đến 3). Bit-0 đến Bit-3 được sử dụng cho chữ số thấp hơn của giá trị ngày (giá trị từ 0 đến 9).
Địa chỉ - 05H:
- Địa chỉ này được sử dụng để đọc / ghi tháng. Bit-4 được sử dụng cho giá trị chữ số trên của tháng là 0 hoặc 1. Và Bit- 0 đến Bit- 3 được sử dụng để lưu trữ giá trị chữ số thấp hơn của tháng (giá trị từ 0 đến 9).
Địa chỉ-06H:
- Địa chỉ này được sử dụng để đọc / ghi giá trị năm. Nó chỉ cung cấp hai chữ số cuối của giá trị năm. Bit- 0 đến Bit- 3 lưu trữ chữ số thấp hơn, và Bit- 4 đến Bit- 7 lưu trữ số cao hơn trong năm.
Address-07H: Control Register

Bit 7 - OUT: Đầu ra
Điều này kiểm soát mức đầu ra của pin SQW / OUT. Khi đầu ra sóng vuông bị tắt, bit SQWE bằng không. Vì vậy, mức logic trên SQW / OUT cao khi bit OUT này cao, và không khi bit OUT này bằng không.
Bit 4 - SQWE
Bật / Tắt đầu ra sóng vuông trên chân SQW / OUT
1 = Bật đầu ra dao động
0 = Vô hiệu hóa đầu ra dao động
Tần số sóng vuông phụ thuộc vào bit RS0 và RS1.
Bit 0: 1 - RS0 & RS1
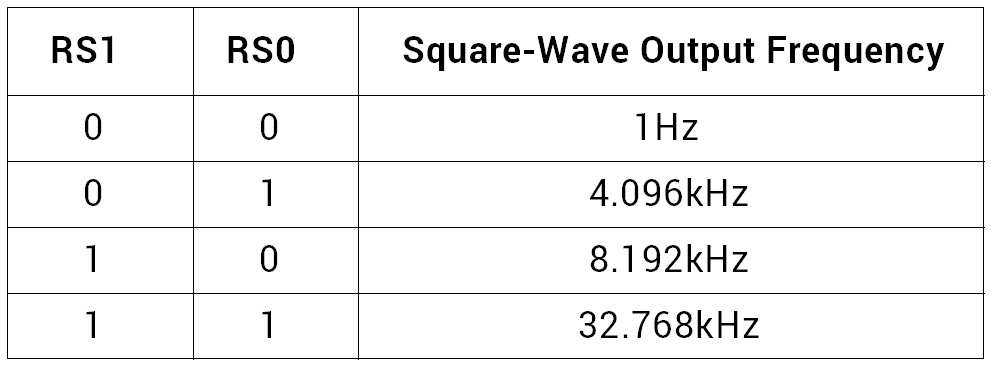
Modul SIM900A
Giới thiệu
SIM900A Modem có thể hoạt động với bất kỳ thẻ SIM nhà điều hành mạng GSM nào giống như điện thoại di động có số điện thoại duy nhất của riêng nó.
SIM900A GSM / GPRS modem là plug and play modem với giao tiếp nối tiếp RS232 được hỗ trợ. Do đó, lợi thế của việc sử dụng modem này sẽ là cổng RS232 của nó có thể được sử dụng để giao tiếp và phát triển các ứng dụng nhúng.
Các ứng dụng như SMS Control, truyền dữ liệu, điều khiển từ xa và đăng nhập có thể được phát triển. Modem SIM900 hỗ trợ các tính năng như cuộc gọi thoại, SMS, Dữ liệu / Fax, GPRS, v.v.
Lưu ý rằng để được kết nối với mạng di động, modem yêu cầu thẻ SIM do nhà cung cấp mạng cung cấp.

Bảng này yêu cầu nguồn điện bên ngoài của ~ 12V và có thể lên tới ~ 2A dòng điện ở đỉnh cao của nó.
Các chỉ số
Nó có hai chỉ báo LED là,
ON: Nó cho thấy Modem đang được cấp nguồn và được bật.
NET: Đèn LED mạng này nhấp nháy khi modem đang kết nối với mạng vô tuyến.
Đèn LED mạng
Khi modem được cấp nguồn, mạng LED nhấp nháy mỗi giây và sau khi đăng ký mạng, nó sẽ bắt đầu nhấp nháy sau mỗi 3 giây. Điều này cho thấy modem được đăng ký với mạng.
Để kiểm tra modem, kết nối bo mạch chủ serially với PC và gửi “ATE0” hoặc “AT” thông qua thiết bị đầu cuối nối tiếp. Nếu nhận được phản hồi “OK” từ modem thì có nghĩa là tất cả đều tốt.
Tham chiếu lệnh AT
Giao tiếp GSM với PC / Laptop
- Trước khi giao tiếp mô-đun SIM900A GSM với vi điều khiển PIC18F4550, chúng ta có thể kiểm tra đầu ra của mô-đun GSM cho các lệnh AT khác nhau trên PC / Laptop.
- Để thực hiện việc này, hãy kết nối mô-đun GSM với PC / máy tính xách tay qua USB để chuyển đổi nối tiếp như hình dưới đây.
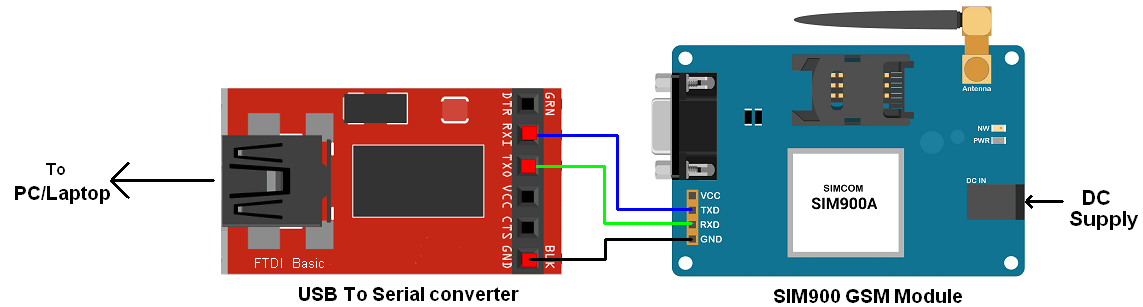
Giao diện nối tiếp Sim900A
- Lắp thẻ SIM
- Kết nối nguồn điện với mô-đun SIM900A GSM.
- Bây giờ, có một đèn LED mạng trên mô-đun GSM nhấp nháy liên tục mỗi giây khi bật nguồn. Khi SIMregisters trong mạng thì đèn LED này nhấp nháy sau mỗi 3 giây. Mất 10-60 giây để đăng ký trong mạng.
- Bây giờ gửi lệnh AT và kiểm tra phản hồi.
- Mỗi lần chúng ta phải viết lệnh và gửi nó bằng phím Enter <CR>. Bạn sẽ luôn thấy phản hồi dưới hình thức
<CR> <LF> <Phản hồi> <CR> <LF>
Trong bảng sau, chỉ có các phản hồi, <CR> <LF> được loại bỏ một cách có chủ ý.
Lệnh AT cơ bản
Có một số lệnh AT cơ bản được sử dụng như sau,
Chỉ huy
|
Sự miêu tả
|
Phản ứng
|
AT
|
Kiểm tra thông tin liên lạc
|
được
|
ATE0 hoặc ATE1
|
Tắt / bật tiếng vang
|
được
|
ATI
|
Nhận dạng sản phẩm
|
ví dụ: SIM900 R11.0
OK
|
AT + GSN
|
Mã nhận dạng số sê-ri sản phẩm (IMEI)
|
NO IMEI.
|
AT + GMI
|
tên nhà sản xuất
|
tên nhà sản xuất
Ví dụ: SIMCOM_LTD
|
AT + GMM
|
Nhận dạng mô hình
|
Mô hình số.
Ví dụ: SIMCOM_900A
|
AT + CSMINS?
|
Báo cáo trạng thái được chèn SIM
|
+ CSMINS: <n>, <SIM được chèn vào>
0: chưa được chèn
1: đã chèn
|
AT + CSPN?
|
Nhận Tên nhà cung cấp dịch vụ từ SIM
|
Tên nhà cung cấp dịch vụ
Ví dụ: + CSPN: “! Dea”, 1
|
Đang gọi
Để sử dụng dịch vụ gọi điện theo các lệnh AT được sử dụng.
Chỉ huy
|
Sự miêu tả
|
Phản ứng
|
ATD <Mob. Số>;
|
Quay số / gọi một số
|
OK (nếu thành công), BUSY (nếu bận), KHÔNG CÓ CARRIER (nếu không có kết nối)
|
ATA
|
Trả lời cuộc gọi
|
OK
|
ATH
|
Kết thúc cuộc gọi
|
OK
|
ATDL
|
Gọi lại số điện thoại cuối cùng đã sử dụng
|
OK (nếu thành công), BUSY (nếu bận), KHÔNG CÓ CARRIER (nếu không có kết nối)
|
Thông điệp
Để sử dụng dịch vụ SMS theo các lệnh AT được sử dụng.
Chỉ huy
|
Sự miêu tả
|
Phản ứng
|
AT + CMGF = <index>
index- 0: PDU 1: Văn bản
|
Chọn định dạng tin nhắn
|
OK
|
AT + CMGS = ”9881xxxxxx”
|
Gửi tin nhắn
|
> ”Nhập tin nhắn tại đây” nhấn 'ctrl + z' để kết thúc tin nhắn hoặc 'ESC' để thoát mà không gửi
OK
|
AT + CMGR = <index>
|
Đọc tin nhắn tại chỉ mục đó
|
+ CMGR: "Tiêu đề thư"
Nội dung thư
OK
|
AT + CMGD = <index>
|
Xóa tin nhắn tại chỉ mục đó
|
OK (nếu có tại chỉ mục đó)
|
AT + CMGDA = ”TẤT CẢ TẤT CẢ”
|
Xóa tất cả SMS
|
OK
|
HTTP (Giao thức truyền siêu văn bản)
Để sử dụng chức năng HTTP sử dụng modem SIM900, hãy làm theo các lệnh AT bên dưới. Hai phương pháp có đó là,
GET: để lấy dữ liệu từ máy chủ.
POST: để đăng dữ liệu lên máy chủ.
Đầu tiên chúng ta cần kết nối với GPRS bằng cách cấu hình profile mang bằng lệnh AT as,
Trình diễn
|
Cú pháp
|
Phản hồi được mong đợi
|
Cấu hình hồ sơ người mang 1
|
AT + SAPBR = 3,1, "Contype", "GPRS"
AT + SAPBR = 3,1, "APN", "internet"
|
OK
OK
|
Để mở ngữ cảnh GPRS.
|
AT + SAPBR = 1,1
|
OK
|
AT + SAPBR = 2,1
|
+ SAPBR: 1,1, "10,89.193,1"
OK
| |
Để đóng ngữ cảnh GPRS.
|
AT + SAPBR = 0,1
|
OK
|
Ghi chú: Nhập Tên Điểm Truy cập (APN) của nhà cung cấp dịch vụ mạng tương ứng. Ví dụ ở đây chúng tôi đã nhập “internet” là mạng APN của IDEA.
Bây giờ chúng ta hãy xem các lệnh AT cho phương thức GET,
Phương thức HTTP GET
Trình diễn
|
Cú pháp
|
Phản hồi được mong đợi
|
Bắt đầu dịch vụ http
|
AT + HTTPINIT
|
OK
|
Đặt thông số cho phiên HTTP
|
AT + HTTPPARA = "CID", 1
AT + HTTPPARA = “URL”, ”api.thingspeak.com”
|
OK
OK
|
TẢI bắt đầu phiên
|
AT + HTTPACTION = 0
|
OK
|
NHẬN thành công
|
AT + SAPBR = 0,1
|
+ HTTPACTION: 0,200,1000
|
Đọc dữ liệu của máy chủ HTTP
|
AT + HTTPREAD
|
+ HTTPREAD: 1000
Đọc dữ liệu….
OK
|
Chấm dứt dịch vụ http
|
AT + HTTPTERM
|
OK
|
Lưu ý: Nhập URL máy khách http. ví dụ ở đây chúng tôi đã nhập "api.thingspeak.com".
Bây giờ chúng ta hãy xem các lệnh AT cho phương thức POST,
Phương thức HTTP POST
Trình diễn
|
Cú pháp
|
Phản hồi được mong đợi
|
Bắt đầu dịch vụ http
|
AT + HTTPINIT
|
OK
|
Đặt thông số cho phiên HTTP
|
AT + HTTPPARA = "CID", 1
AT + HTTPPARA = “URL”, ”www.google.com”
|
OK
OK
|
POST dữ liệu có kích thước là 100Bytes và thời gian trễ tối đa để nhập là 10000ms. Bạn nên đặt thời gian chờ đủ lâu để tải xuống tất cả Dữ liệu trong thời gian chờ.
|
AT + HTTPDATA = 100.100
|
TẢI VỀ
Nhập dữ liệu có kích thước chính xác được đề cập trong cú pháp
OK
Tất cả dữ liệu đã được nhận
|
Bắt đầu phiên POST
|
AT + HTTPACTION = 1
|
OK
|
POST thành công
|
+ HTTPACTION: 1,200,0
| |
Chấm dứt dịch vụ http
|
AT + HTTPTERM
|
được
|
TCP (Giao thức điều khiển truyền)
TCP là giao thức truyền thông của internet. Có hai chế độ kết nối được sử dụng cho ứng dụng TCP / IP SIM900A,
- Single Connection
- Chỉ có thể thiết lập một kết nối. - Multi Connection
- Có thể thiết lập 8 kết nối.
Có hai chế độ ứng dụng TCP / IP,
- Chế độ trong suốt
- Chế độ không trong suốt (Bình thường)
Lưu ý, khi ở chế độ đa kết nối SIM900A chỉ có thể hoạt động ở chế độ Không trong suốt.
Hãy xem các lệnh TCP Client connection AT
Trình diễn
|
Cú pháp
|
Phản hồi được mong đợi
|
Để chọn chế độ kết nối
|
AT + CIPMUX = 0
|
OK
|
Đặt apn, tên người dùng và mật khẩu
|
Cho kết nối duy nhất
AT + CSTT = "APN", "USERNAME", "PASSWORD"
|
OK
|
Mang đến kết nối không dây
|
AT + CIICR
|
OK
|
Nhận IP cục bộ
|
AT + CIFSR
|
IP cục bộ, ví dụ: “10.81.14.12”
|
Kết nối TCP khởi động
|
cho một kết nối,
AT + CIPSTART = "TCP", "api.thingspeak.com", "80"
|
CONNECT OK
|
Gửi dữ liệu
|
AT + CIPSEND
|
>
… Nhập dữ liệu và thay thế CTRL + Z (0x1A)….
GỬI OK
|
Đóng kết nối
|
Để đóng nhanh,
AT + CIPCLOSE = 1
|
ĐÓNG OK
|
Tắt GPRS
|
AT + CIPSHUT
|
SHUT OK
|
Modul GPS
Giới thiệu
Máy thu GPS thường được sử dụng trong điện thoại thông minh, hệ thống quản lý hạm đội, quân đội, vv để theo dõi hoặc tìm vị trí.
G lobal P ositioning S ystem (GPS) là một hệ thống vệ tinh dựa trên sử dụng vệ tinh và trạm mặt đất để đo lường và tính toán vị trí của nó trên Trái Đất.
GPS còn được gọi là Hệ thống định vị với GPS thời gian và phạm vi (NAVSTAR).
Máy thu GPS cần nhận dữ liệu từ ít nhất 4 vệ tinh cho mục đích chính xác. Bộ thu GPS không truyền bất kỳ thông tin nào tới vệ tinh.
Bộ nhận GPS này được sử dụng trong nhiều ứng dụng như điện thoại thông minh, Buồng, Quản lý đội tàu, v.v.
Cách hoạt động của GPS
Nguồn GIF: Wikipedia
Bộ thu tín hiệu GPS sử dụng chòm sao vệ tinh và trạm mặt đất để tính toán vị trí chính xác ở bất cứ vị trí nào.
Các vệ tinh GPS này truyền tín hiệu thông tin qua tần số vô tuyến (1,1 đến 1,5 GHz) tới đầu thu. Với sự trợ giúp của thông tin nhận được này, một trạm mặt đất hoặc mô-đun GPS có thể tính toán vị trí và thời gian của nó.
Làm thế nào GPS nhận tính toán vị trí và thời gian của nó
Máy thu GPS nhận tín hiệu thông tin từ vệ tinh GPS và tính khoảng cách từ vệ tinh. Điều này được thực hiện bằng cách đo thời gian cần thiết để tín hiệu đi từ vệ tinh đến máy thu.
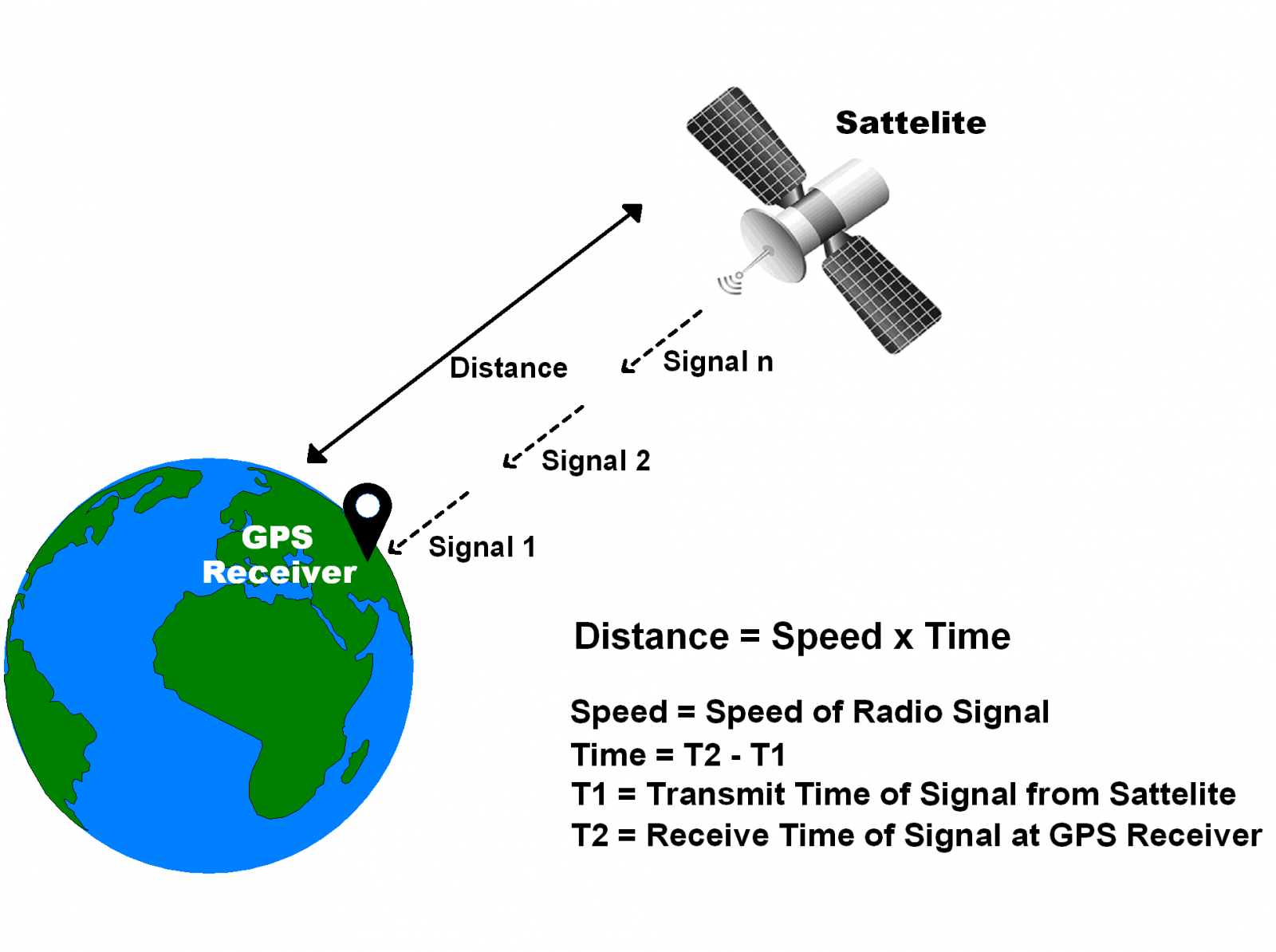
Tính toán khoảng cách GPS
Ở đâu,
Tốc độ = Tốc độ tín hiệu vô tuyến xấp xỉ bằng tốc độ ánh sáng tức là
Thời gian = Thời gian cần thiết cho tín hiệu truyền từ vệ tinh đến người nhận.
Bằng cách trừ thời gian đã gửi khỏi thời gian nhận được, chúng tôi có thể xác định thời gian đi lại.
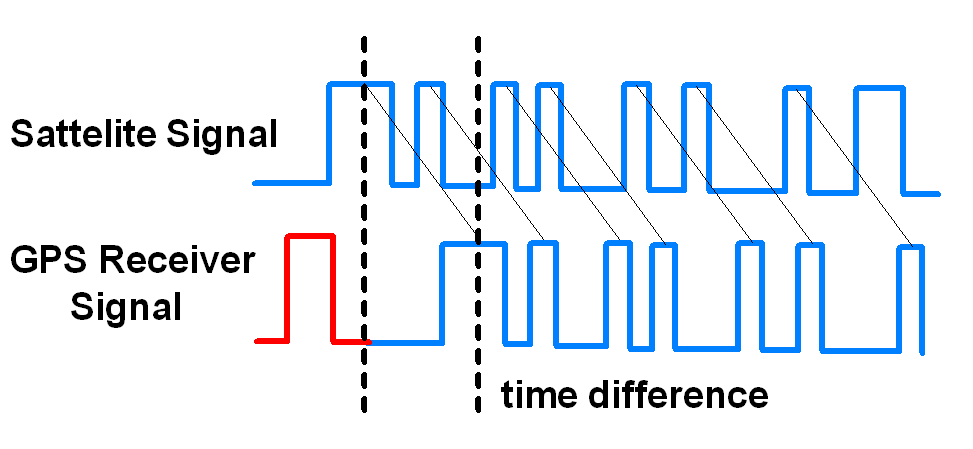
Chênh lệch thời gian tín hiệu GPS
Để xác định khoảng cách, cả bộ thu vệ tinh và GPS đều phát ra cùng một tín hiệu giả mã cùng một lúc.
Vệ tinh truyền mã giả; được nhận bởi bộ thu GPS.
Hai tín hiệu này được so sánh và sự khác biệt giữa các tín hiệu là thời gian di chuyển.
Mô-đun GPS
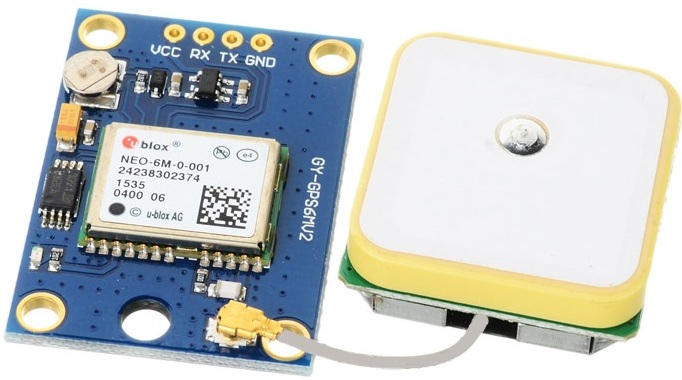
Người nhận GPS
Mô-đun thu GPS cung cấp đầu ra theo định dạng chuỗi NMEA tiêu chuẩn (National Marine Electronics Association). Nó cung cấp đầu ra serially trên pin Tx với tốc độ mặc định 9600 Baud.
Ngõ ra chuỗi NMEA từ bộ thu GPS chứa các thông số khác nhau được phân tách bằng dấu phẩy như kinh độ, vĩ độ, độ cao, thời gian, vv. Mỗi chuỗi bắt đầu bằng '$' và kết thúc bằng chuỗi trả về dòng / dòng.
Ví dụ
$ GPGGA, 184237.000,1829.9639, N, 07347.6174, E, 1,05,2,1,607,1, M, -64,7, M ,, 0000 * 7D
$ GPGSA, A, 3,15,25,18,26,12 ,,,,,,,,,3,2,1,4,8 * 36
$ GPGSV, 3,1,11,15,47,133,46,25,44,226,45,18,37,238,45,26,34,087,40 * 72
$ GPGSV, 3,2,11,12,27,184,45,24,02,164,26,29,58,349,, 05,26,034, * 7F
$ GPGSV, 3,3,11,21,25,303,, 02,11,071,, 22,01,228, * 40
$ GPRMC, 184237.000, A, 1829.9639, N, 07347.6174, E, 0,05,180,19,230514 ,,, A * 64
Mô tả pin
Module thu GPS
VCC: Nguồn điện 3.3 - 6 V
GND: Mặt đất
TX: Truyền dữ liệu serially cung cấp thông tin về vị trí, thời gian, v.v.
RX: Nhận dữ liệu serially. Nó là cần thiết khi chúng tôi muốn cấu hình module GPS.
Kiểm tra mô-đun GPS
Trước khi Interfacing module GPS với vi điều khiển PIC18F4550, chúng ta có thể kiểm tra đầu ra của module GPS. Từ chuỗi đó, chúng tôi có thể trích xuất thông tin như kinh độ, vĩ độ, thời gian hữu ích để tìm thông tin vị trí và thời gian.
Để thực hiện việc này, hãy kết nối mô-đun GPS này với PC qua cổng USB đến Bộ chuyển đổi nối tiếp hoặc đầu nối DB9. Ngoài ra, nó là cần thiết để giữ ăng ten của module GPS vào vị trí thích hợp.
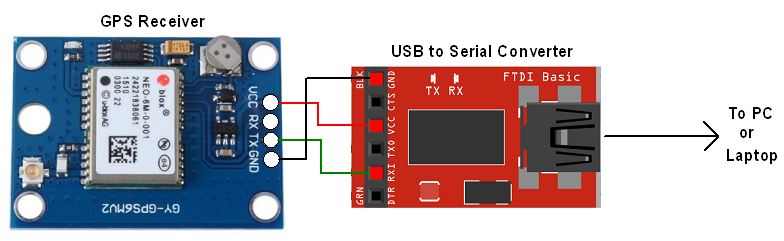
Giao diện nối tiếp GPS
- Bây giờ mở bất kỳ thiết bị đầu cuối nối tiếp như Realterm, Hyper terminal, Putty, vv trên PC / laptop.
- Mở PORT với tốc độ truyền 9600.
- Thiết bị đầu cuối sẽ hiển thị dữ liệu đến từ mô đun bộ thu GPS.
Dữ liệu đầu ra từ mô-đun nhận GPS hiển thị trên một thiết bị đầu cuối nối tiếp như sau.
Trong chuỗi trên, chuỗi NMEA bắt đầu bằng “$ GPGGA” được sử dụng phổ biến nhất. Nó cung cấp cho chúng tôi Thời gian, Kinh độ, Vĩ độ và Độ cao cùng với chỉ đường. Thông tin này hữu ích khi tìm Thời gian và Vị trí.
Ví dụ
$ GPGGA, 184241.000,1829.9639, N, 07347.6174, E, 1,05,2,1,607,1, M, -64,7, M ,, 0000 * 7C
Tên
|
Thí dụ
|
Các đơn vị
|
Sự miêu tả
|
ID tin nhắn
|
$ GPGGA
|
Tiêu đề giao thức GGA
| |
Thời gian UTC
|
184241.000
|
hhmmss.sss
| |
Vĩ độ
|
1829.9639
|
ddmm.mmmm
| |
Chỉ báo N / S
|
N
|
N = Bắc, S = Nam
| |
Kinh độ
|
07347.6174
|
dddmm.mmmm
| |
Chỉ số E / W
|
E
|
E = Đông, W = Tây
| |
Chỉ báo khắc phục vị trí
|
1
|
Sửa chế độ GPS SPS
| |
Đã sử dụng vệ tinh
|
05
|
Phạm vi 0 đến 12
| |
HDOP
|
2.1
|
Ngang pha loãng chính xác
| |
Độ cao MSL
|
607,1
|
Mét
|
Có nghĩa là mực nước biển
|
Các đơn vị
|
M
|
Mét
| |
Phân tách Geoid
|
64,7
|
Mét
| |
Các đơn vị
|
M
|
Mét
| |
Tuổi của Diff. Corr.
|
- -
|
Trường trống nếu DGPS không được sử dụng
| |
Khác biệt ID trạm ref
|
0000
| ||
Checksum
|
* 7C
| ||
Vận chuyển đường dây nguồn cấp dữ liệu
|
<CR> <LF>
|
Kết thúc truyền tin nhắn
|
Ma trận phím 4x4
Giới thiệu
- Khi chúng ta muốn giao diện một khóa cho vi điều khiển thì nó cần một chốt GPIO. Nhưng khi chúng tôi muốn giao diện nhiều phím như 9, 12 hoặc 16, vv, sau đó nó có thể có được tất cả các chân GPIO của vi điều khiển.
- Để tiết kiệm một số chân GPIO của vi điều khiển, chúng ta có thể sử dụng bàn phím ma trận. Bàn phím ma trận là gì, nhưng các phím sắp xếp theo hàng và cột.
- Ví dụ: nếu chúng ta muốn giao diện 16 phím cho vi điều khiển thì chúng tôi yêu cầu 16 chân GPIO nhưng nếu chúng tôi sử dụng bàn phím ma trận 4x4 thì chúng tôi chỉ yêu cầu 8 chân GPIO của vi điều khiển.

Bàn phím 4x4
Cấu trúc ma trận bàn phím 4x4

Bàn phím được tổ chức theo ma trận các hàng và cột. Khi nhấn một phím, một hàng và một cột sẽ tạo một số liên lạc Nếu không; không có kết nối giữa các hàng và cột.
Bàn phím ma trận làm việc
Quét các phím
Để phát hiện một phím bấm, vi điều khiển căn cứ tất cả các hàng bằng cách cung cấp 0 cho chốt đầu ra, và sau đó nó đọc các cột được hiển thị trong hình trên.
- Nếu dữ liệu đọc từ các cột là = 1111, không có phím nào được nhấn trong hình trên. và quá trình tiếp tục cho đến khi nhấn phím được phát hiện.
- Bây giờ, hãy xem xét khóa được tô sáng ở hình trên. bị ép buộc. Sau khi nhấn phím, nó sẽ liên lạc với hàng có cột được hiển thị bên dưới.

- Nếu một trong các bit cột có số không, điều này có nghĩa là một lần nhấn phím đã xảy ra.
- Ví dụ: nếu C1: C4 = 1011, điều này có nghĩa là một khóa trong cột C2 đã được nhấn.
- Sau khi phát hiện một phím bấm, vi điều khiển sẽ đi qua quá trình xác định khóa.
Quy trình xác định khóa
Bắt đầu từ hàng trên cùng, bộ vi điều khiển sẽ nối đất nó bằng cách chỉ cung cấp R1 tới hàng thấp.
- Bây giờ đọc các cột, nếu dữ liệu đọc là tất cả 1s, không có khóa nào trong hàng đó được nhấn và quá trình tiếp tục cho hàng tiếp theo.
- Vì vậy, bây giờ mặt đất hàng tiếp theo, R2. Đọc các cột, kiểm tra bất kỳ số không và quá trình này tiếp tục cho đến khi hàng được xác định.
- Ví dụ: Trong trường hợp trên, chúng ta sẽ nhận được hàng 2 trong đó cột không bằng 1111.
- Vì vậy, sau khi xác định hàng mà phím đã được nhấn, chúng ta có thể dễ dàng tìm ra khóa theo giá trị hàng và cột.
Bàn phím interfacing sử dụng một dây
Có thể giao diện Bàn phím với mọi kích thước chỉ bằng một chân Analog. Nó được dựa trên mạng chia điện áp.
Ví dụ như bàn phím 4x4 giao tiếp với một dây như hình dưới đây.
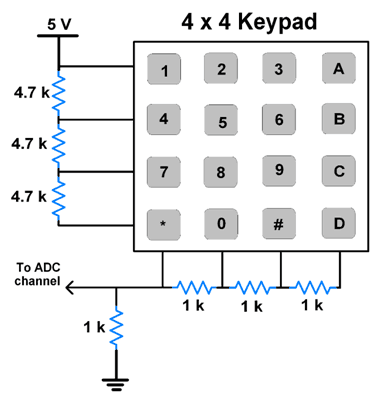
Lưu ý: Các kết hợp giá trị điện trở có thể khác nhau.
GLCD 128x64
Giới thiệu
LCD đồ họa có 128x64 pixel. Nó có 128 cột và 64 phân đoạn hàng.

- Nó sử dụng hai trình điều khiển phân đoạn hiển thị. Kể từ khi lái xe phân khúc có 64 kênh, mô-đun GLCD chứa hai trình điều khiển phân đoạn để lái xe 128 phân đoạn cột.
- Nó có một trình điều khiển phổ biến mà ổ đĩa 64 phân đoạn hàng cũng như nó tạo ra đồng hồ và tín hiệu điều khiển cho hai trình điều khiển phân đoạn như trong hình dưới đây.

Chân GLCD128x64
Mô-đun GLCD JHD12864E có 20 chân như trong hình bên dưới.

Kể từ khi nó có hai phân khúc trình điều khiển để lái xe 128 cột phân đoạn, GLCD chia thành hai phần tức là bên trái và bên phải. Nó có 20 chân. Bảng sau sẽ hiển thị mô tả pin với chức năng của chúng.
Số pin
|
Ký hiệu
|
Sự miêu tả
|
Chức năng
|
1
|
VSS
|
Đất
|
0V
|
2
|
VDD
|
Nguồn cung cấp cho mạch logic
|
+ 5V
|
3
|
VO
|
Độ tương phản lcd
Điều chỉnh
|
Điều khiển tương phản
|
4
|
RS
|
Hướng dẫn / Dữ liệu
Đăng ký lựa chọn
|
RS = 0: Hướng dẫn đăng ký
RS = 1: Đăng ký dữ liệu
|
5
|
R / W
|
Lựa chọn đọc / ghi
|
R / W = 0: Viết
R / W = 0: Đã đọc
|
6
|
E
|
Bật tín hiệu
| |
7 - 14
|
DB0 – DB7
|
Dữ liệu đầu vào / đầu ra dòng
|
8 bit
|
15
|
CS1
|
Lựa chọn Chip (Seg. Driver)
|
CS1 = 1: Chọn Chip1
|
16
|
CS2
|
Lựa chọn Chip (Seg. Driver)
|
CS2 = 1: Chọn Chip2
|
17
|
RST
|
Đặt lại tín hiệu
|
RST = 0: Hiển thị TẮT,
Hiển thị từ dòng 0
|
18
|
VEE
|
Điện áp âm cho lái xe LCD
|
-10 V
|
19
|
LED +
|
Điện áp cung cấp forLed +
|
+ 5V
|
20
|
LED-
|
Cung cấp điện áp cho Led-
|
0V
|
Viết tới GLCD 128x64
Hãy xem cách viết cho LCD đồ họa. Nó cần phải biết nơi dữ liệu được hiển thị trên GLCD. Hình cho thấy nơi và làm thế nào dữ liệu D0-D7 sẽ được nhìn thấy trên màn hình.
Hình trên hiển thị địa chỉ X (Hàng) và Y (Cột) để chọn vị trí để ghi dữ liệu. Hai bộ điều khiển điều khiển mỗi nửa màn hình. Mỗi nửa màn hình có địa chỉ dọc 64 pixel được truy cập bởi địa chỉ Y từ 0x40 đến 0x7F . Hai bộ điều khiển này được chọn bằng các chân CS1 và CS2 để chọn một nửa hiển thị để ghi,
- Để chọn nửa bên trái của màn hình, chúng ta cần tạo CS1 = 1, CS2 = 0.
- Để chọn đúng nửa màn hình, chúng ta cần tạo CS1 = 0, CS2 = 1.
Địa chỉ X được hiển thị trong hình trên như trang 0 - 7. Mỗi trang chứa 8 hàng.
Hiển thị dữ liệu trên GLCD
Để hiển thị dữ liệu trên màn hình LCD, chúng ta cần ghi dữ liệu trên các chân dữ liệu LCD. Sau khi cung cấp địa chỉ thích hợp, chúng tôi có thể gửi dữ liệu đến GLCD. Giá trị dữ liệu được ánh xạ trực tiếp theo pixel để phát sáng. Theo đó, chúng tôi cần gửi dữ liệu.

Hình trên cho thấy dữ liệu in trên GLCD,
- Chúng ta cần thiết lập địa chỉ Y từ nơi chúng ta cần viết, tức là ở đây nó là từ vị trí đầu tiên, vì vậy địa chỉ là 0x40.
- Sau đó chúng ta cần thiết lập địa chỉ X là trang đầu tiên, tức là 0xB8.
- Và ghi dữ liệu như thể hiện trong hình trên vào chân dữ liệu. Nó sẽ in như trong hình.
Hướng dẫn cho JHD12864E GLCD
Không.
|
Chỉ dẫn
|
RS
|
R / W
|
DB7
|
DB6
|
DB5
|
DB4
|
DB3
|
DB2
|
DB1
|
DB0
|
Chức năng
|
1
|
Hiển thị ON / OFF
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
1
|
1
|
0/1
|
Hiển thị điều khiển ON / OFF
0 = OFF 1 = BẬT
|
2
|
Đặt địa chỉ Y
|
0
|
0
|
0
|
1
|
Địa chỉ Y (0 - 63)
|
Đặt địa chỉ Y
| |||||
3
|
Đặt Trang (Địa chỉ X)
|
0
|
0
|
1
|
0
|
1
|
1
|
1
|
Trang (0 - 7)
|
Đặt địa chỉ X
| ||
4
|
Đặt dòng bắt đầu hiển thị (Địa chỉ Z)
|
0
|
0
|
1
|
1
|
Hiển thị dòng bắt đầu (0 - 63)
|
Đặt dòng bắt đầu hiển thị
| |||||
5
|
Đọc trạng thái
|
0
|
1
|
Bận
|
0
|
BẬT / TẮT
|
Cài lại
|
0
|
0
|
0
|
0
|
Trạng thái đọc
Bận:
0 = Sẵn sàng
1 = Bận
BẬT / TẮT:
0 = Hiển thị BẬT
1 = Hiển thị OFF
Cài lại:
0 = Bình thường
1 = Đặt lại
|
6
|
Ghi dữ liệu hiển thị
|
1
|
0
|
Ghi dữ liệu
|
Ghi dữ liệu vào RAM dữ liệu hiển thị. Sau khi viết hướng dẫn, Địa chỉ Y tăng lên 1 lần tự động
| |||||||
7
|
Đọc dữ liệu hiển thị
|
1
|
1
|
Đọc dữ liệu
|
Đọc dữ liệu từ dữ liệu hiển thị RAM sang bus dữ liệu
| |||||||
Hiển thị ON / OFF
Hiển thị các điều khiển lệnh điều khiển dữ liệu Hiển thị chức năng ON / OFF. Nó được sử dụng để hiển thị dữ liệu trong RAM trên màn hình. Nó được điều khiển bởi bit DB0 như trong bảng trên.
1 = Hiển thị dữ liệu trên màn hình.
0 = Không hiển thị dữ liệu trên màn hình.
Đặt địa chỉ Y
Y Địa chỉ của dữ liệu hiển thị RAM được đặt trong bộ đếm Địa chỉ Y. Bất cứ khi nào thao tác ghi / đọc được thực hiện, bộ đếm địa chỉ Y được tự động tăng lên một.
Đặt địa chỉ X (Trang)
Địa chỉ X (trang) của dữ liệu hiển thị RAM cần được đặt trong X Address Register. Ở đây, người dùng cần tăng trang thông qua chương trình sau mỗi lần tràn địa chỉ Y xuất hiện trên trang hiện tại. Lưu ý rằng nếu địa chỉ X (trang) không tăng lên sau khi tràn địa chỉ Y xảy ra, thì ghi đè sẽ xảy ra trên trang hiện tại.
Đặt dòng bắt đầu hiển thị (Địa chỉ Z)
Z Địa chỉ của dữ liệu hiển thị RAM được đặt trong Đăng ký dòng bắt đầu hiển thị. Nó được sử dụng để thiết lập hàng (0 - 63) dòng từ nơi dữ liệu sẽ được hiển thị trên màn hình. Thông thường, nó đặt thành 0 tức là dữ liệu sẽ được hiển thị từ dòng đầu tiên trên dòng thứ 0 (dòng đầu tiên).
Đọc trạng thái
Hướng dẫn này được sử dụng để đọc trạng thái của GLCD.
Bận: Trạng thái bận
1 = Thiết bị đang bận trong khi thực hiện thao tác bên trong. Không có chỉ dẫn nào được chấp nhận.
0 = Thiết bị sẵn sàng chấp nhận lệnh.
ON / OFF: Hiển thị trạng thái ON / OFF
1 = Hiển thị BẬT
0 = Hiển thị OFF
Đặt lại: Đặt lại trạng thái
1 = Hiển thị hệ thống đang được khởi tạo. Không có hướng dẫn nào sẽ được chấp nhận ngoại trừ trạng thái Đọc hướng dẫn.
0 = Hệ thống đang hoạt động bình thường.
Ghi dữ liệu hiển thị
Lệnh này ghi dữ liệu 8 bit vào RAM dữ liệu hiển thị.
Đọc dữ liệu hiển thị
Lệnh này đọc dữ liệu 8 bit từ RAM dữ liệu hiển thị.
Cân nhắc GLCD
Vì có nhiều loại mô-đun GLCD khác nhau có sẵn trên thị trường,
- Điều quan trọng là kiểm tra bảng dữ liệu cho các mô-đun GLCD.
- Mỗi cấu hình và thông số kỹ thuật pin khác nhau.
- Các kết nối không chính xác là nguyên nhân phổ biến nhất gây ra sự cố.
- Nên cẩn thận khi sử dụng chân nguồn vì dây điện không đúng có thể làm hỏng mô-đun.
- Kiểm tra hướng dẫn các giá trị thời gian từ biểu dữ liệu.
Khởi tạo
Để khởi tạo màn hình, chúng ta cần thực hiện các bước dưới đây,
- Gửi lệnh OFF hiển thị tức là 0x3E
- Gửi địa chỉ Y ví dụ tại đây 0x40 (Địa chỉ bắt đầu).
- Gửi địa chỉ X (Trang) ví dụ tại đây 0xB8 (Trang0).
- Gửi địa chỉ Z (Dòng bắt đầu), ví dụ ở đây 0xC0 (từ dòng 0).
- Bây giờ gửi lệnh Hiển thị ON tức là 0x3F
Viết lệnh
Để viết lệnh, chúng ta cần thực hiện các bước dưới đây,
- Gửi lệnh trên chân dữ liệu.
- Thực hiện RS = 0 (Command Register) và RW = 0 (Thao tác ghi).
- Thực hiện chuyển đổi Cao đến Thấp trên Bật pin tối thiểu 1 chu kỳ.
Viết dữ liệu
Để ghi dữ liệu, chúng tôi cần thực hiện các bước dưới đây,
- Gửi dữ liệu trên chân dữ liệu.
- Thực hiện RS = 1 (Đăng ký dữ liệu) và RW = 0 (Thao tác ghi).
- Thực hiện chuyển đổi Cao đến Thấp trên Bật pin có thời lượng tối thiểu 1us.
Hiển thị hình ảnh
Hãy xem cách hiển thị hình ảnh trên GLCD. Chúng tôi có thể hiển thị hình ảnh nhị phân lên đến độ phân giải 128x64 pixel. Hình ảnh nhị phân có nghĩa là mỗi pixel chỉ có hai giá trị tức là 0 hoặc 1. Vì vậy, ở đây trong GLCD 128x64, pixel đó sẽ là BẬT hoặc TẮT.
- Đầu tiên, chúng ta cần biết rằng GLCD 128x64 JHD12864E chỉ có thể hiển thị hình ảnh nhị phân.
- Vì vậy, chúng ta cần phải chuyển đổi hình ảnh thành định dạng nhị phân để hiển thị nó trên GLCD.
- Có một số cách để làm điều này, chúng tôi sẽ sử dụng ứng dụng Image2GLCD.
- Ứng dụng Image2GLCD chuyển đổi các tập tin ảnh định dạng JPG, GIF, BMP, PNG sang định dạng nhị phân.
- Ứng dụng này tạo ra dữ liệu nhị phân để đại diện cho hình ảnh trên GLCD.
- Như hình dưới đây, nhấp vào Mở để chọn hình ảnh từ ổ đĩa và Lưu dữ liệu.
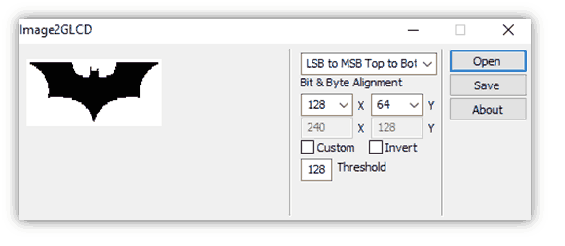
- Và bây giờ bạn đã lưu dữ liệu hình ảnh nhị phân để in trên GLCD. Đơn giản chỉ cần viết nó vào GLCD và xem hình ảnh của bạn trên GLCD.
Bạn có thể tải xuống ứng dụng Image2GLCD từ tệp đính kèm bên dưới
Modul Anlog joystick
Giới thiệu
- Nokia5110 là một màn hình đồ họa với độ phân giải 48x84 có thể được sử dụng để hiển thị hình ảnh, văn bản và các mẫu khác nhau.
- Nokia5110 là màn hình 8 pin có bộ điều khiển hiển thị bên trong PCD8544 được sử dụng để điều khiển / điều khiển tất cả 48 hàng và 84 cột của màn hình.
- Giao diện hiển thị cho vi điều khiển thông qua giao diện ngoại vi nối tiếp tức là (SPI).

Màn hình Nokia 5110
Ghim mô tả của Nokia5110
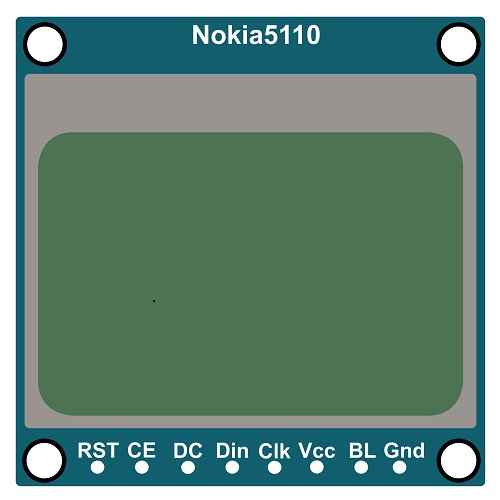
RST: RESET
Đây là một pin yếu đang hoạt động, được sử dụng để đặt lại màn hình.
CE: Chip Kích hoạt
Chip cho phép hoạt động pin thấp.Điều này được sử dụng để kích hoạt giao tiếp với màn hình.
DC: Dữ liệu / Lệnh
DC được sử dụng để gửi dữ liệu và lệnh.
DC = 0, để gửi lệnh đến màn hình
DC = 1, để gửi dữ liệu đến màn hình
Din: Dữ liệu trong
Din pin được sử dụng để gửi dữ liệu đến màn hình Nokia5110.
Clk: Đồng hồ
Clk là chốt đồng hồ của Nokia5110. Đây là pin SCK (Serial Clock) của giao thức SPI.
VCC & GND:
VCC và mặt đất là chân nguồn của Nokia5110.Chúng tôi phải cung cấp 3,3 - 5V V như VCC.
BL: Đèn nền
BL là pin đèn nền. Khi pin này hoạt động cao thì đèn nền của Nokia5110 sẽ bật. Vì vậy, chúng tôi có thể trực tiếp kết nối nó với VCC.
Cấu trúc hiển thị Nokia5110
Trong Nokia5110 hiển thị 84 cột và 48 hàng được sử dụng.
Địa chỉ hàng (Địa chỉ Y): Có tổng cộng 6 hàng. Mỗi hàng có chiều cao 8 pixel. Vì vậy, địa chỉ hàng được cung cấp dưới dạng địa chỉ Y = 0 đến 5.
Địa chỉ cột (Địa chỉ X): Khi hiển thị có tổng số 84 pixel trong mỗi hàng, do đó X address = 0 đến 83.
Ví dụ: Giả sử chúng ta muốn in dữ liệu trên hàng thứ 3 ở giữa thì chúng ta phải cung cấp địa chỉ là địa chỉ Y = 2 và X address = 41.
Khi hiển thị có tổng số pixel = 48x84 = 4032, Chúng tôi cũng có thể cung cấp địa chỉ của các pixel từ 0 đến 4031.
Nếu chúng tôi cung cấp địa chỉ trên giới hạn, nó sẽ không được xem xét bởi màn hình.
Cấu trúc hiển thị Nokia5110
Các lệnh cho Nokia5110
Khởi tạo
Một xung đặt lại (thấp đến cao) phải được áp dụng để đặt lại pin. Độ rộng xung của tín hiệu thấp không được nhỏ hơn 100 ms.Tất cả các thanh ghi bên trong được đặt lại bằng cách áp dụng xung thấp tới chân RST.
Lưu ý rằng, thiết bị có thể bị hỏng nếu không được đặt lại đúng cách.
Thiết lập chức năng
Đối với hoạt động chức năng của Nokia5110, chúng tôi phải sử dụng các bit sau.

Bit 2- PD: Công suất điều khiển bit
Khi PD là logic thì Nokia5110 đang ở chế độ tắt nguồn.
Bit 1 - V: Chế độ dọc / ngang
1 = Chế độ địa chỉ dọc, địa chỉ vị trí của màn hình tăng theo chiều dọc tức là địa chỉ Y tăng thêm 1 và khi nó đạt đến 5 (giới hạn tối đa), tăng địa chỉ x một và địa chỉ Y cuộn qua 0.
0 = Chế độ địa chỉ ngang, địa chỉ vị trí hiển thị tăng theo chiều ngang, tức là tăng địa chỉ X và khi nó đạt đến 83 (giới hạn tối đa), địa chỉ Y tăng thêm một và địa chỉ X cuộn qua 0.
Bit 0 - H: Lựa chọn thiết lập lệnh
Khi bit này là logic thì hướng dẫn bên ngoài sẽ được chọn, nếu không lệnh nội bộ sẽ được chọn.
Bit 5: Bit này luôn được đặt thành 1.
Điều khiển hiển thị
Thanh ghi này được sử dụng để điều khiển chế độ hoạt động của màn hình Nokia5110.

Bảng hiển thị, ý nghĩa của thanh ghi điều khiển hiển thị.
D
|
E
|
Hoạt động
|
0
|
0
|
Hiển thị Trống
|
0
|
1
|
Chế độ thông thường
|
1
|
0
|
Tất cả phân đoạn hiển thị trên
|
1
|
1
|
Chế độ nghịch đảo
|
Bảng: Ý nghĩa của bit D và E của thanh ghi điều khiển hiển thị
Đặt địa chỉ Y của RAM
Địa chỉ Y được sử dụng để giải quyết hoặc trỏ đến ma trận hàng (0-5) cụ thể. Địa chỉ Y có thể thay đổi từ 0 đến 5 màn hình. Có thể xác định địa chỉ Y bằng các bit Y0, Y1 và Y2 của thanh ghi.

Y2
|
Y1
|
Y0
|
Vị trí của Y-Address
|
0
|
0
|
0
|
Bank 0
|
0
|
0
|
1
|
Bank 1
|
0
|
1
|
0
|
Bank 2
|
0
|
1
|
1
|
Bank 3
|
1
|
0
|
0
|
Bank 4
|
1
|
0
|
1
|
Bank 5
|
Ví dụ: Nếu chúng ta phải định địa chỉ hàng 3 hoặc ngân hàng 3 thì địa chỉ Y sẽ là 0x43.
Đặt địa chỉ X của RAM
Địa chỉ X được sử dụng để giải quyết hoặc chỉ ra ma trận cột cụ thể. Giá trị địa chỉ cho X có thể thay đổi từ 00 đến 83 (cột) của màn hình. Địa chỉ X được xác định bằng cách sử dụng các bit X0 đến X6 của thanh ghi.

Ví dụ: Nếu chúng ta phải địa chỉ cột thứ 7 của một hàng thì địa chỉ X sẽ là 0x87.
Chúng ta phải gửi các địa chỉ X và Y này làm lệnh cho màn hình bằng cách giữ DC = 0.
Kiểm soát nhiệt độ
Do sự phụ thuộc nhiệt độ của độ nhớt LCD, điện áp điều khiển LCD VLCD phải được tăng ở nhiệt độ thấp hơn để duy trì độ tương phản tối ưu. Hệ số nhiệt độ của VLCD có thể được thiết lập bằng cách sử dụng các bit TC1 và TC0 ở bên dưới thanh ghi.

TC1: TC0: Nhiệt độ hệ số chọn bit
TC1
|
TC0
|
Hệ số nhiệt độ VLCD
|
|---|---|---|
0
|
0
|
Hệ số nhiệt độ 0
|
0
|
1
|
Hệ số nhiệt độ 1
|
1
|
0
|
Hệ số nhiệt độ 2
|
1
|
1
|
Hệ số nhiệt độ 3
|
Cài đặt giá trị thiên vị
Thanh ghi sau được sử dụng để thiết lập mức điện áp Bias bằng cách sử dụng bit BS2, BS1 và BS0.

BS2
|
BS1
|
BS0
|
Tỷ lệ Mux được đề xuất
|
|---|---|---|---|
0
|
0
|
0
|
1: 100
|
0
|
0
|
1
|
1:80
|
0
|
1
|
0
|
1 :: 65
|
0
|
1
|
1
|
1:48
|
1
|
0
|
0
|
1: 40 / 1:34
|
1
|
0
|
1
|
1:24
|
1
|
1
|
0
|
1: 18/1: 16
|
1
|
1
|
1
|
1: 10/1: 8/1: 9
|
Hình ảnh hiển thị trên màn hình
Khi màn hình có độ phân giải 84x48 pixel, chúng tôi có thể hiển thị hình ảnh nhị phân lên tới độ phân giải 84x48.

Hình ảnh màu sắc để chuyển đổi hình ảnh nhị phân
- Để chuyển đổi hình ảnh RGB thành hình ảnh nhị phân, đầu tiên chúng ta phải chuyển đổi nó thành ảnh Grayscale, có tổng số 256 mức màu xám, trong đó giá trị cho màu đen là 0 và giá trị cho màu trắng là 255.
- Hình ảnh thang độ xám có thể được chuyển đổi thành hình ảnh nhị phân bằng cách đặt giá trị ngưỡng. Nếu giá trị của pixel vượt quá ngưỡng, nó được đặt thành nhị phân 1 nếu không nó sẽ chuyển thành số nhị phân 0.
- Ở đây chúng tôi đang sử dụng phần mềm Image2GLCD để lấy mảng ảnh nhị phân.
- Phần mềm này chuyển đổi bất kỳ loại hình ảnh nào thành hình ảnh bản đồ bit và cung cấp cho chúng tôi các giá trị Hình ảnh nhị phân theo định dạng mảng.
- Cửa sổ chính image2GLCD:
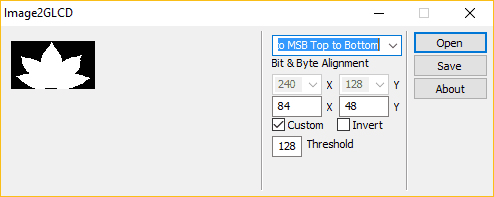
Phần mềm chuyển đổi hình ảnh (Image2GLCD)
- Trong bước đầu tiên của phần mềm này là mở vị trí tệp hình ảnh và chọn hình ảnh sẽ được hiển thị. Hình ảnh được xem trước sẽ được hiển thị ở phía bên trái của phần mềm.
- Đặt căn chỉnh thành “LSB thành MSB TOP thành Bottom”.
- Đánh dấu vào ô tùy chỉnh và nhập kích thước độ phân giải pixel GLCD trên các hộp X và Y, trong đó X cho biết Chiều rộng và Y cho biết chiều cao.
- Sau khi tất cả các sắp xếp bấm vào nút lưu sau đó phần mềm sẽ tạo ra tập tin C và tập tin tiêu đề của mảng hình ảnh nhị phân.
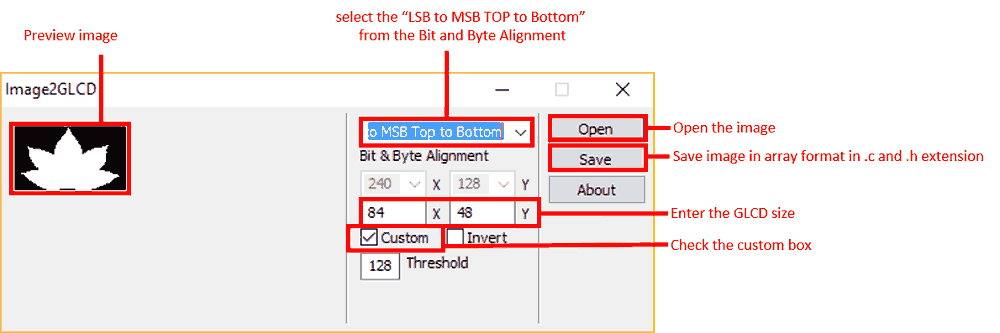
Image2GLCD
Lưu ý: Đôi khi giá trị mảng trong tệp tiêu đề được tạo ít hơn số lượng thực tế. Vì vậy, hãy kiểm tra điều này trước khi hiển thị hình ảnh. Ví dụ, giả sử hiển thị 84x48, chúng ta cần tổng giá trị mảng 504. Nhưng sử dụng phần mềm này chúng tôi có thể nhận được 496 hoặc ít hơn 504. Vì vậy, hãy chèn các giá trị còn lại trong mảng theo cách thủ công.
Bạn có thể tải xuống ứng dụng Image2GLCD từ các tệp đính kèm bên dưới.
Hỗ trợ tập tin
Modul RFID
Giới thiệu
- Nhận dạng tần số vô tuyến (RFID) là một công nghệ nhận dạng không dây sử dụng sóng vô tuyến để xác định sự hiện diện của các thẻ RFID.
- Cũng giống như đầu đọc mã vạch, công nghệ RFID được sử dụng để nhận dạng người, đối tượng, vv.
- Trong công nghệ mã vạch, chúng ta cần quét mã vạch bằng cách giữ nó ở phía trước đầu đọc, trong khi trong công nghệ RFID, chúng ta chỉ cần mang các thẻ RFID trong phạm vi độc giả. Ngoài ra, mã vạch có thể bị hỏng hoặc không thể đọc được, không phải trong trường hợp của hầu hết RFID.
- RFID được sử dụng trong nhiều ứng dụng như hệ thống chấm công, trong đó mỗi người sẽ có thẻ RFID riêng biệt của họ sẽ giúp xác định người và sự tham gia của họ.
- RFID được sử dụng ở nhiều công ty để cung cấp quyền truy cập cho nhân viên được ủy quyền của họ.
- Nó cũng hữu ích để theo dõi hàng hóa và trong hệ thống thu phí tự động trên đường cao tốc bằng cách nhúng thẻ (có ID duy nhất) vào chúng.
RFID dựa trên hệ thống có hai yếu tố cơ bản
1. Thẻ RFID:
Thẻ RFID bao gồm microchip với ăng-ten radio gắn trên đế mang 12 số Byte duy nhất.

Thẻ RFID bên trong

2. RFID Reader:
Nó được sử dụng để đọc ID duy nhất từ thẻ RFID. Bất cứ khi nào các thẻ RFID đến trong phạm vi, đầu đọc RFID đọc ID duy nhất của nó và truyền nó một cách serially đến vi điều khiển hoặc PC. Đầu đọc RFID có bộ thu phát và ăng ten gắn trên nó. Nó chủ yếu được cố định ở vị trí cố định.
Mô-đun đầu đọc RFID EM18
Về cơ bản, các hệ thống RFID được phân loại là hoạt động và thụ động dựa trên cách chúng được hỗ trợ và phạm vi của chúng.
1. Hệ thống RFID hoạt động
Thẻ RFID hoạt động có nguồn phát và nguồn điện riêng của họ (Chủ yếu là pin hoạt động). Chúng hoạt động ở tần số 455 MHz, 2,45 GHz hoặc 5,8 GHz, và chúng thường có phạm vi đọc từ 60 đến 300 feet (20 mét đến 100 mét).
2. Hệ thống RFID thụ động
Thẻ RFID thụ động không có bộ phát, chúng chỉ phản ánh năng lượng (sóng vô tuyến) quay lại từ ăng-ten đầu đọc RFID. Chúng hoạt động ở tần số thấp (~ 125 KHz) cũng như dải tần số cao (~ 13 MHz) và có phạm vi đọc giới hạn lên tới ~ 1m.
Có hai chế độ ghép nối cho giao tiếp được sử dụng trong RFID như,
Khớp nối cảm ứng, trong đó đầu đọc RFID phát ra từ trường và bất cứ khi nào các thẻ RFID đi vào từ trường tạo ra phản ứng năng lượng từ các thẻ RFID và được phát hiện bởi đầu đọc RFID. Khi từ trường giảm mạnh với khoảng cách, nó được sử dụng cho các ứng dụng khoảng cách ngắn.
Khớp nối điện dung, nơi mà đầu đọc phát ra sóng điện từ và bất cứ khi nào sóng gặp phải các thẻ RFID, thẻ RFID phản ánh tín hiệu chứa thông tin của ID.
RFID hoạt động như thế nào?
Đầu đọc RFID có bộ thu phát tạo tín hiệu vô tuyến và truyền tín hiệu qua ăng-ten. Bản thân tín hiệu này ở dạng năng lượng được sử dụng để kích hoạt và cấp nguồn cho thẻ.
Khi thẻ RFID xuất hiện trong phạm vi tín hiệu được truyền bởi người đọc, bộ phát trong thẻ được nhấn bởi tín hiệu này. Một thẻ rút ra nguồn điện từ trường điện từ do người đọc tạo ra. Sau đó, transponder chuyển đổi tín hiệu radio đó thành sức mạnh có thể sử dụng. Sau khi nhận được nguồn, bộ phát tín hiệu gửi tất cả thông tin mà nó đã lưu trữ trong đó, chẳng hạn như ID duy nhất cho đầu đọc RFID dưới dạng tín hiệu RF. Sau đó, đầu đọc RFID đặt dữ liệu ID duy nhất này dưới dạng byte trên chân Tx (truyền) nối tiếp. Dữ liệu này có thể được sử dụng hoặc truy cập bằng PC hoặc vi điều khiển bằng cách sử dụng giao tiếp UART.
Có nhiều trình đọc RFID khác nhau có sẵn theo tần suất của chúng được hiển thị như sau,
Tần số
|
Phạm vi
|
Các mô-đun khác nhau
|
Các ứng dụng
|
120-150 kHz
|
5-20 cm
|
EM-18, ILA-12, v.v.
|
Thu thập dữ liệu nhà máy, xác định động vật, v.v.
|
13,56 MHz
|
10 cm - 1m
|
MFRC522, SM130
|
Nhưng chiêc thẻ thông minh
|
Đầu đọc RFID EM18
EM18 là một đầu đọc RFID được sử dụng để đọc các thẻ RFID có tần số 125 kHz.
Sau khi đọc thẻ, nó truyền ID duy nhất serially cho PC hoặc vi điều khiển bằng cách sử dụng giao tiếp UART hoặc định dạng Wiegand trên các chân tương ứng.
Đầu đọc RFID EM18 đọc dữ liệu từ các thẻ RFID có chứa ID lưu trữ có dung lượng 12 byte.
Đầu đọc RFID EM18 không yêu cầu tầm nhìn. Ngoài ra, nó có phạm vi xác định đó là ngắn tức là trong vài cm.
Đầu đọc RFID EM-18 tính năng:
1. Đầu ra RS232 / TTL nối tiếp
2. Tần số hoạt động là 125KHz.
3. Phạm vi là 5-8 cm.
Đầu đọc RFID để giao tiếp PC / Laptop
Chúng ta có thể thấy đầu ra đầu đọc RFID trên thiết bị đầu cuối nối tiếp của PC / Laptop.

Giao diện nối tiếp RFID
Khi chúng tôi mang thẻ RFID đến gần đầu đọc, nó đọc dữ liệu từ thẻ và ngay lập tức truyền ID duy nhất 12 byte trên cổng nối tiếp.
12 Số nhận dạng duy nhất Byte
Thẻ RFID chứa 12 Byte ID duy nhất.
Dữ liệu 10 byte đầu tiên
|
2 byte cuối cùng
|
Tag no
|
Checksum
|
Các byte checksum này sẽ là kết quả XOR của 10 byte đầu tiên, tức là Tag no.
Không có nhận xét nào:
Đăng nhận xét